Introduction
Expectations and conventions
This course assumes that the reader has basic familiarity with C (especially number types, arithmetic operations, string literals and stack vs heap). It will thus not explain concepts which are rigorously identical between Rust and C for the sake of concision. If this is not your case, feel free to ask the teacher about any surprising construct in the course’s material.
We will also compare Rust with C++ where they differ, so that readers familiar with C++ can get a good picture of Rust specificities. But previous knowledge of C++ should not be necessary to get a good understanding of Rust via this course.
Finally, we will make heavy use of “C/++” abbreviation as a shorter alternative to “C and C++” when discussing common properties of C and C++, and how they compare to Rust.
Intended workflow
Welcome to this practical about writing high performance computing in Rust!
You should have been granted access to a browser-based version of Visual Studio Code, where everything needed for the practical is installed. The intended workflow is for you to have this document opened in one browser tab, and the code editor opened in another tab (or even two browser windows side by side if your computer’s screen allows for it).
After performing basic Visual Studio Code configuration, I advise opening a
terminal, which you can do by showing the bottom pane of the code editor using
the Ctrl+J keyboard shortcut.
You would then go to the exercises directory if you’re not already there…
cd ~/exercises
And, when you’re ready to do the exercises, start running cargo run with the
options specified by the corresponding course material.
The exercises are based on code examples that are purposely incorrect.
Therefore, any code example within the provided exercises Rust project, except
for 00-hello.rs, will either fail to compile or fail to run to completion. A
TODO code comment or … symbol will indicate where failures are expected, and
your goal in the exercises will be to modify the code in such a way that the
associated example will compile and run. For runtime failures, you should not
need to change the failing assertion, instead you will need to change other code
such that the assertion passes.
If you encounter any failure which does not seem expected, or if you otherwise get stuck, please call the teacher for guidance!
Now, let’s get started with actual Rust code. You can move to the next page, or any other page within the course for that matter, through the following means:
- Left and right keyboard arrow keys will switch to the previous/next page. Equivalently, arrow buttons will be displayed at the end of each page, doing the same thing.
- There is a menu on the left (not shown by default on small screen, use the top-left button to show it) that allows you to quickly jump to any page of the course. Note, however, that the course material is designed to be read in order.
- With the magnifying glass icon in the top-left corner, or the “S” keyboard shortcut, you can open a search bar that lets you look up content by keywords.
Running the course environment locally
After the school, if you want to get back to this course, you will be able to
run the same development environment on your machine by installing podman or
docker and running the following command:
# Replace "podman" with "docker" if you prefer to use docker
podman run -p 8080:8080 --rm -it gitlab-registry.in2p3.fr/grasland/grayscott-with-rust/rust_code_server
You will then be able to connect to the environement by opening the
http://127.0.0.1:8080 URL in your web browser, and typing in the password that
is displayed at the beginning of the console output of podman run.
Please refrain from doing so during the school, however:
- These container images are designed to please HPC sysadmins who are unhappy with internet downloads from compute nodes. Therefore they bundle everything that may be possibly needed during the course, and are quite heavyweight as a result. If everyone attempts to download them at once at the beginning of the course, it may saturate the building’s or CCIN2P3’s internet connection and therefore disrupt the classes.
- Making your local GPUs work inside of the course’s container can require a fair amount of work, especially if you use NVidia GPUs, whose driver is architected in a manner that is fundamentally hostile to Linux containers. Your local organizers will have done their best to make it work for you during the school, saving you a lot of time. Without such support, a CPU emulation will be used, so the GPU examples will still work but run very slowly.
As for Apptainer/Singularity, although it is reasonably compatible with Docker/Podman container images, it actually does many things very differently from other container engines as far as running containers is concerned. Therefore, it must be run in a very exotic configuration for the course environment to work as expected. Please check out the course repository’s README for details.
First steps
Welcome to Rust computing. This chapter will be a bit longer than the next ones, because we need to introduce a number of basic concepts that you will likely all need to do subsequent exercises. Please read on carefully!
Hello world
Following an ancient tradition, let us start by displaying some text on stdout:
fn main() { println!("Hello world!"); }
Notice the following:
- In Rust, functions declarations start with the
fnkeyword. - Like in C/++, the main function of a program is called
main. - It is legal to return nothing from
main. Likereturn 0;in C/++, it indicates success. - Sending a line of text to standard output can be done using the
println!()macro. We’ll get back to why it is a macro later, but in a nutshell it allows controlling the formatting of values in a way that is similar toprintf()in C and f-strings in Python.
Variables
Rust is in many ways a hybrid of programming languages from the C/++ family and the ML family (Ocaml, Haskell). Following the latter’s tradition, it uses a variable declaration syntax that is very reminiscent of mathematical notation:
#![allow(unused)] fn main() { let x = 4; }
As in mathematics, variables are immutable by default, so the following code does not compile:
#![allow(unused)] fn main() { let x = 4; x += 2; // ERROR: Can't modify non-mut variable }
If you want to modify a variable, you must make it mutable by adding a mut
keyword after let:
#![allow(unused)] fn main() { let mut x = 4; x += 2; // Fine, variable is declared mutable }
This design gently nudges you towards using immutable variables for most things, as in mathematics, which tends to make code easier to reason about.
Alternatively, Rust allows for variable shadowing, so you are allowed to define a new variable with the same name as a previously declared variable, even if it has a different type:
#![allow(unused)] fn main() { let foo = 123; // Here "foo" is an integer let foo = "456"; // Now "foo" is a string and old integer "foo" is not reachable }
This pattern is commonly used in scenarios like parsing where the old value should not be needed after the new one has been declared. It is otherwise a bit controversial, and can make code harder to read, so please don’t abuse this possibility.
Type inference
What gets inferred
Rust is a strongly typed language like C++, yet you may have noticed that the variable declarations above contain no types. That’s because the language supports type inference as a core feature: the compiler can automatically determine the type of variables based on various information.
-
First, the value that is affected to the variable may have an unambiguous type. For example, string literals in Rust are always of type
&str(“reference-to-string”), so the compiler knows that the following variablesmust be of type&str:#![allow(unused)] fn main() { let s = "a string literal of type &str"; } -
Second, the way a variable is used after declaration may give its type away. If you use a variable in a context where a value of type
Tis expected, then that variable must be of typeT.For example, Rust provides a heap-allocated variable-sized array type called
Vec(similar tostd::vectorin C++), whose length is defined to be of typeusize(similar tosize_tin C/++). Therefore, if you use an integer as the length of aVec, the compiler knows that this integer must be of typeusize:#![allow(unused)] fn main() { let len = 7; // This integer variable must be of type usize... let v = vec![4.2; len]; // ...because it's used as the length of a Vec here. // (we'll introduce this vec![] macro later on) } -
Finally, numeric literals can be annotated to force them to be of a specific type. For example, the literal
42i8is a 8-bit signed integer, the literal666u64is a 64-bit unsigned integer, and the12.34f32literal is a 32-bit (“single precision”) IEEE-754 floating point number. By this logic, the following variablexis a 16-bit unsigned integer:#![allow(unused)] fn main() { let x = 999u16; }If none of the above rules apply, then by default, integer literals will be inferred to be of type
i32(32-bit signed integer), and floating-point literals will be inferred to be of typef64(double-precision floating-point number), as in C/++. This ensures that simple programs compile without requiring type annotations.Unfortunately, this fallback rule is not very reliable, as there are a number of common code patterns that will not trigger it, typically involving some form of genericity.
What does not get inferred
There are cases where these three rules will not be enough to determine a variable’s type. This happens in the presence of generic type and functions.
Getting back to the Vec type, for example, it is actually a generic type
Vec<T> where T can be almost any Rust type1. As with std::vector in
C++, you can have a Vec<i32>, a Vec<f32>, or even a Vec<MyStruct> where
MyStruct is a data structure that you have defined yourself.
This means that if you declare empty vectors like this…
#![allow(unused)] fn main() { // The following syntaxes are strictly equivalent. Neither compile. See below. let empty_v1 = Vec::new(); let empty_v2 = vec![]; }
…the compiler has no way to know what kind of Vec you are dealing with. This
cannot be allowed because the properties of a generic type like Vec<T> heavily
depend on what concrete T parameter it’s instantiated with, therefore the
above code does not compile.
In that case, you can enforce a specific variable type using type ascription:
#![allow(unused)] fn main() { // The compiler knows this is a Vec<bool> because we said so let empty_vb: Vec<bool> = Vec::new(); }
Inferring most things is the idiom
If you are coming from another programming language where type inference is either not provided, or very hard to reason about as in C++, you may be tempted to use type ascription to give an explicit type to every single variable. But I would advise resisting this temptation for a few reasons:
- Rust type inference rules are much simpler than those of C++. It only takes a small amount of time to “get them in your head”, and once you do, you will get more concise code that is less focused on pleasing the type system and more on performing the task at hand.
- Doing so is the idiomatic style in the Rust ecosystem. If you don’t follow it, your code will look odd to other Rust developers, and you will have a harder time reading code written by other Rust developers.
- If you have any question about inferred types in your program, Rust comes with excellent IDE support, so it is very easy to configure your code editor so that it displays inferred types, either all the time or on mouse hover.
But of course, there are limits to this approach. If every single type in the program was inferred, then a small change somewhere in the implementation your program could non-locally change the type of many other variables in the program, or even in client code, resulting in accidental API breakages, as commonly seen in dynamically typed programming language.
For this reason, Rust will not let you use type inference in entities that may appear in public APIs, like function signatures or struct declarations. This means that in Rust code, type inference will be restricted to the boundaries of a single function’s implementation. Which makes it more reliable and easier to reason about, as long as you do not write huge functions.
Back to println!()
With variable declarations out of the way, let’s go back to our hello world example and investigate the Rust text formatting macro in more details.
Remember that at the beginning of this chapter, we wrote this hello world statement:
#![allow(unused)] fn main() { println!("Hello world!"); }
This program called the println macro with a string literal as an argument.
Which resulted in that string being written to the program’s standard output,
followed by a line feed.
If all we could pass to println was a string literal, however, it wouldn’t
need to be a macro. It would just be a regular function.
But like f-strings in Python, the println provides a variety of text
formatting operations, accessible via curly braces. For example, you can
interpolate variables from the outer scope…
#![allow(unused)] fn main() { let x = 4; // Will print "x is 4" println!("x is {x}"); }
…pass extra arguments in a style similar to printf in C…
#![allow(unused)] fn main() { let s = "string"; println!("s is {}", s); }
…and name arguments so that they are easier to identify in complex usage.
#![allow(unused)] fn main() { println!("x is {x} and y is {y}. Their sum is {x} + {y} = {sum}", x = 4, y = 5, sum = 4 + 5); }
You can also control how these arguments are converted to strings, using a mini-language that is described in the documentation of the std::fmt module from the standard library.
For example, you can enforce that floating-point numbers are displayed with a certain number of decimal digits:
#![allow(unused)] fn main() { let x = 4.2; // Will print "x is 4.200000" println!("x is {x:.6}"); }
println!() is part of a larger family of text formatting and text I/O macros
that includes…
print!(), which differs fromprintln!()by not adding a trailing newline at the end. Beware that since stdout is line buffered, this will result in no visible output until the nextprintln!(), unless the text that you are printing contains the\nline feed character.eprint!()andeprintln!(), which work likeprint!()andprintln!()but write their output to stderr instead of stdout.write!()andwriteln!(), which take a byte or text output stream2 as an extra argument and write down the specified text there. This is the same idea asfprintf()in C.format!(), which does not write the output string to any I/O stream, but instead builds a heap-allocatedStringcontaining it for later use.
All of these macros use the same format string mini-language as println!(),
although their semantics differ. For example, write!() takes an extra output
stream arguments, and returns a Result to account for the possibility of I/O
errors. Since these errors are rare on stdout and stderr, they are just treated
as fatal by the print!() family, keeping the code that uses them simpler.
From Display to Debug
So far, we have been printing simple numerical types. What they have in common is that there is a single, universally agreed upon way to display them, modulo formatting options. So the Rust standard library can afford to incorporate this display logic into its stability guarantees.
But some other types are in a muddier situation. For example, take the Vec
dynamically-sized array type. You may think that something like “[1, 2, 3, 4,
5]” would be a valid way to display an array containing the numbers containing
numbers from 1 to 5. But what happens when the array contains billions of
numbers? Should we attempt to display all of them, drowning the user’s terminal
in endless noise and slowing down the application to a crawl? Or should we
summarize the display in some way like numpy does in Python?
There is no single right answer to this kind of question, and attempting to account for all use cases would bloat up Rust’s text formatting mini-language very quickly. So instead, Rust does not provide a standard text display for these types, and therefore the following code does not compile:
#![allow(unused)] fn main() { // ERROR: Type Vec does not implement Display println!("{}", vec![1, 2, 3, 4, 5]); }
All this is fine and good, but we all know that in real-world programming, it is very convenient during program debugging to have a way to exhaustively display the contents of a variable. Unlike C++, Rust acknowledges this need by distinguishing two different ways to translate a typed value to text:
- The
Displaytrait provides, for a limited set of types, an “official” value-to-text translation logic that should be fairly consensual, general-purpose, suitable for end-user consumption, and can be covered by library stability guarantees. - The
Debugtrait provides, for almost every type, a dumber value-to-text translation logic which prints out the entire contents of the variable, including things which are considered implementation details and subjected to change. It is purely meant for developer use, and showing debug strings to end users is somewhat frowned upon, although they are tolerated in developer-targeted output like logs or error messages.
As you may guess, although Vec does not implement the Display operation, it
does implement Debug, and in the mini-language of println!() et al, you can
access this alternate Debug logic using the ? formatting option:
#![allow(unused)] fn main() { println!("{:?}", vec![1, 2, 3, 4, 5]); }
As a more interesting example, strings implement both Display and Debug. The
Display variant displays the text as-is, while the Debug logic displays it
as you would type it in a program, with quotes around it and escape sequences
for things like line feeds and tab stops:
#![allow(unused)] fn main() { let s = "This is a \"string\".\nWell, actually more of an str."; println!("String display: {s}"); println!("String debug: {s:?}"); }
Both Display and Debug additionally support an alternate display mode,
accessible via the # formatting option. For composite types like Vec, this
has the effect of switching to a multi-line display (one line feed after each
inner value), which can be more readable for complex values:
#![allow(unused)] fn main() { let v = vec![1, 2, 3, 4, 5]; println!("Normal debug: {v:?}"); println!("Alternate debug: {v:#?}"); }
For simpler types like integers, this may have no effect. It’s ultimately up to
implementations of Display and Debug to decide what this formatting option
does, although staying close to the standard library’s convention is obviously
strongly advised.
Finally, for an even smoother printout-based debugging experience, you can use
the dbg!() macro. It takes an expression as input and prints out…
- Where you are in the program (source file, line, column).
- What is the expression that was passed to
dbg, in un-evaluated form (e.g.dbg!(2 * x)would literally print “2 * x”). - What is the result of evaluating this expression, with alternate debug formatting.
…then the result is re-emitted as an output, so that the program can keep
using it. This makes it easy to annotate existing code with dbg!() macros,
with minimal disruption:
#![allow(unused)] fn main() { let y = 3 * dbg!(4 + 2); println!("{y}"); }
Assertions
With debug formatting covered, we are now ready to cover the last major component of the exercises, namely assertions.
Rust has an assert!() macro which can be used similarly to the C/++ macro of
the same name: make sure that a condition that should always be true if the code
is correct, is indeed true. If the condition is not true, the thread will panic.
This is a process analogous to throwing a C++ exception, which in simple cases
will just kill the program.
#![allow(unused)] fn main() { assert!(1 == 1); // This will have no user-visible effect assert!(2 == 3); // This will trigger a panic, crashing the program }
There are, however, a fair number of differences between C/++ and Rust assertions:
-
Although well-intentioned, the C/++ practice of only checking assertions in debug builds has proven to be tracherous in practice. Therefore, most Rust assertions are checked in all builds. When the runtime cost of checking an assertion in release builds proves unacceptable, you can use
debug_assert!()instead, for assertions which are only checked in debug builds. -
Rust assertions do not abort the process in the default compiler configuration. Cleanup code will still run, so e.g. files and network conncections will be closed properly, reducing system state corruption in the event of a crash. Also, unlike unhandled C++ exceptions, Rust panics make it trivial to get a stack trace at the point of assertion failure by setting the
RUST_BACKTRACEenvironment variable to 1. -
Rust assertions allow you to customize the error message that is displayed in the event of a failure, using the same formatting mini-language as
println!():#![allow(unused)] fn main() { let sonny = "dead"; assert!(sonny == "alive", "Look how they massacred my boy :( Why is Sonny {}?", sonny); }
Finally, one common case for wanting custom error messages in C++ is when
checking two variables for equality. If they are not equal, you will usually
want to know what are their actual values. In Rust, this is natively supported
by the assert_eq!() and assert_ne!(), which respectively check that two
values are equal or not equal.
If the comparison fails, the two values being compared will be printed out with Debug formatting.
#![allow(unused)] fn main() { assert_eq!(2 + 2, 5, "Don't you dare make Big Brother angry! >:("); }
Exercise
Now, go to your code editor, open the examples/01-let-it-be.rs source
file, and address the TODOs in it. The code should compile and runs successfully
at the end.
To attempt to compile and run the file after making corrections, you may use the following command in the VSCode terminal:
cargo run --example 01-let-it-be
…with the exception of dynamic-sized types, an advanced topic which we cannot afford to cover during this short course. Ask the teacher if you really want to know ;)
In Rust’s abstraction vocabulary, text can be written to implementations
of one of the std::io::Write and std::fmt::Write traits. We will
discuss traits much later in this course, but for now you can think of a
trait as a set of functions and properties that is shared by multiple
types, allowing for type-generic code. The distinction between io::Write
and fmt::Write is that io::Write is byte-oriented and fmt::Write
latter is text-oriented. We need this distinction because not every byte
stream is a valid text stream in UTF-8.
Numbers
Since this is a numerical computing course, a large share of the material will be dedicated to the manipulation of numbers (especially floating-point ones). It is therefore essential that you get a good grasp of how numerical data works in Rust. Which is the purpose of this chapter.
Primitive types
We have previously mentioned some of Rust’s primitive numerical types. Here is the current list:
u8,u16,u32,u64andu128are fixed-size unsigned integer types. The number indicates their storage width in bits.usizeis an unsigned integer type suitable for storing the size of an object in memory. Its size varies from one computer to another : it is 64-bit wide on most computers, but can be as narrow as 16-bit on some embedded platform.i8,i16,i32,i64,i128andisizeare signed versions of the above integer types.f32andf64as the single-precision and double-precision IEEE-754 floating-point types.
This list is likely to slowly expand in the future, for example there are
proposals for adding f16 and f128 to this list (representing IEEE-754
half-precision and quad-precision floating point types respectively). But for
now, these types can only be manipulated via third-party libraries.
Literals
As you have seen, Rust’s integer and floating-point literals look very similar
to those of C/++. There are a few minor differences, for example the
quality-of-life feature to put some space between digits of large numbers uses
the _ character instead of '…
#![allow(unused)] fn main() { println!("A big number: {}", 123_456_789); }
…but the major difference, by far, is that literals are not typed in Rust. Their type is almost always inferred based on the context in which they are used. And therefore…
- In Rust, you rarely need typing suffixes to prevent the compiler from truncating your large integers, as is the norm in C/++.
- Performance traps linked to floating point literals being treated as double precision when you actually want single precision computations are much less common.
Part of the reason why type inference works so well in Rust is that unlike C/++, Rust has no implicit conversions.
Conversions
In C/++, every time one performs arithmetic or assigns values to variables, the compiler will silently insert conversions between number types as needed to get the code to compile. This is problematic for two reasons:
- “Narrowing” conversions from types with many bits to types with few bits can lose important information, and thus produce wrong results.
- “Promoting” conversions from types with few bits to types with many bits can result in computations being performed with excessive precision, at a performance cost, only for the hard-earned extra result bits to be discarded during the final variable affectation step.
If we were to nonetheless apply this notion in a Rust context, there would be a third Rust-specific problem, which is that implicit conversions would break the type inference of numerical literals in all but the simplest cases. If you can pass variables of any numerical types to functions accepting any other numerical type, then the compiler’s type inference cannot know what is the numerical literal type that you actually intended to use. This would greatly limit type inference effectiveness.
For all these reasons, Rust does not allow for implicit type conversions. A
variable of type i8 can only accept values of type i8, a variable of type
f32 can only accept values of type f32, and so on.
If you want C-style conversions, the simplest way is to use as casts:
#![allow(unused)] fn main() { let x = 4.2f32 as i32; }
As many Rust programmers were unhappy with the lossy nature of these casts, fancier conversions with stronger guarantees (e.g. only work if no information is lost, report an error if overflow occurs) have slowly been made available. But we probably won’t have the time to cover them in this course.
Arithmetic
The syntax of Rust arithmetic is generally speaking very similar to that of
C/++, with a few minor exceptions like ! replacing ~ for integer bitwise
NOT. But the rules for actually using these operators are quite different.
For the same reason that implicit conversions are not supported, mixed
arithmetic between multiple numerical types is not usually supported in Rust
either. This will often be a pain points for people used to the C/++ way, as it
means that classic C numerical expressions like 4.2 / 2 are invalid and will
not compile. Instead, you will need to get used to writing 4.2 / 2.0.
On the flip side, Rust tries harder than C/++ to handler incorrect arithmetic operations in a sensible manner. In C/++, two basic strategies are used:
- Some operations, like overflowing unsigned integers or assigning the 123456 literal to an 8-bit integer variable, silently produce results that violate mathematical intuition.
- Other operations, like overflowing signed integers or casting floating-point NaNs and infinities to integers, result in undefined behavior. This gives the compiler and CPU license to trash your entire program (not just the function that contains the faulty instruction) in unpredictable ways.
As you may guess by the fact that signed and unsigned integer operations are treated differently, it is quite hard to guess which strategy is being used, even though one is obviously a lot more dangerous than the other.
But due to the performance impact of checking for arithmetic errors at runtime, Rust cannot systematically do so and remain performance-competitive with C/++. So a distinction is made between debug and release builds:
- In debug builds, invalid arithmetic stops the program using panics. You can think of a panic as something akin to a C++ exception, but which you are not encouraged to recover from.
- In release builds, invalid arithmetic silently produces wrong results, but never causes undefined behavior.
As one size does not fit all, individual integer and floating-point types also
provide methods which re-implement the arithmetic operator with different
semantics. For example, the saturating_add() method of integer types handle
addition overflow and underflow by returning the maximal or minimal value of the
integer type of interest, respectively:
#![allow(unused)] fn main() { println!("{}", 42u8.saturating_add(240)); // Prints 255 println!("{}", (-40i8).saturating_add(-100)); // Prints -128 }
Methods
In Rust, unlike in C++, any type can have methods, not just class-like types. As a result, most of the mathematical functions that are provided as free functions in the C and C++ mathematical libraries are provided as methods of the corresponding types in Rust:
#![allow(unused)] fn main() { let x = 1.2f32; let y = 3.4f32; let basic_hypot = (x.powi(2) + y.powi(2)).sqrt(); }
Depending on which operation you are looking at, the effectiveness of this
design choice varies. On one hand, it works great for operations which are
normally written on the right hand side in mathematics, like raising a number to
a certain power. And it allows you to access mathematical operations with less
module imports. On the other hand, it looks decidedly odd and Java-like for
operations which are normally written in prefix notation in mathematics, like
sin() and cos().
If you have a hard time getting used to it, note that prefix notation can be
quite easily implemented as a library, see for example
prefix-num-ops.
The set of operations that Rust provides on primitive types is also a fair bit broader than that provided by C/++, covering many operations which are traditionally only available via compiler intrinsics or third-party libraries in other languages. Although to C++’s credit, it must be said that the situation has, in a rare turn of events, actually been improved by newer standard revisions.
To know which operations are available via methods, just check the appropriate pages from the standard library’s documentation.
Exercise
Now, go to your code editor, open the examples/02-numerology.rs source file,
and address the TODOs in it. The code should compile and runs successfully at
the end.
To attempt to compile and run the file after making corrections, you may use the following command in the VSCode terminal:
cargo run --example 02-numerology
Loops and arrays
As a result of this course being time-constrained, we do not have the luxury of deep-diving into Rust possibilities like a full Rust course would. Instead, we will be focusing on the minimal set of building blocks that you need in order to do numerical computing in Rust.
We’ve covered variables and basic debugging tools in the first chapter, and we’ve covered integer and floating-point arithmetic in the second chapter. Now it’s time for the last major language-level component of numerical computations: loops, arrays, and other iterable constructs.
Range-based loop
The basic syntax for looping over a range of integers is simple enough:
#![allow(unused)] fn main() { for i in 0..10 { println!("i = {i}"); } }
Following an old tradition, ranges based on the .. syntax are left inclusive
and right exclusive, i.e. the left element is included, but the right element is
not included. The reasons why this is a good default have been explained at
length
elsewhere,
so we will not bother with repeating them here.
However, Rust acknowledges that ranges that are inclusive on both sides also have their uses, and therefore they are available through a slightly more verbose syntax:
#![allow(unused)] fn main() { println!("Fortran and Julia fans, rejoice!"); for i in 1..=10 { println!("i = {i}"); } }
The Rust range types are actually used for more than iteration. They accept
non-integer bounds, and they provide a contains() method to check that a value
is contained within a range. And all combinations of inclusive, exclusive, and
infinite bounds are supported by the language, even though not all of them can
be used for iteration:
- The
..infinite range contains all elements in some ordered set x..ranges start at a certain value and contain all subsequent values in the set..yand..=yranges start at the smallest value of the set and contain all values up to an exclusive or inclusive upper bound- The
Boundstandard library type can be used to cover all other combinations of inclusive, exclusive, and infinite bounds, via(Bound, Bound)tuples
Iterators
Under the hood, the Rust for loop has no special support for ranges of
integers. Instead, it operates over a pair of lower-level standard library
primitives called
Iterator and
IntoIterator.
These can be described as follows:
- A type that implements the
Iteratortrait provides anext()method, which produces a value and internally modifies the iterator object so that a different value will be produced when thenext()method is called again. After a while, a specialNonevalue is produced, indicating that all available values have been produced, and the iterator should not be used again. - A type that implements the
IntoIteratortrait “contains” one or more values, and provides aninto_iter()method which can be used to create anIteratorthat yields those inner values.
The for loop uses these mechanisms as follows:
#![allow(unused)] fn main() { fn do_something(i: i32) {} // A for loop like this... for i in 0..3 { do_something(i); } // ...is effectively translated into this during compilation: let mut iterator = (0..3).into_iter(); while let Some(i) = iterator.next() { do_something(i); } }
Readers familiar with C++ will notice that this is somewhat similar to STL iterators and C++11 range-base for loops, but with a major difference: unlike Rust iterators, C++ iterators have no knowledge of the end of the underlying data stream. That information must be queried separately, carried around throughout the code, and if you fail to handle it correctly, undefined behavior will ensue.
This difference comes at a major usability cost, to the point where after much debate, 5 years after the release of the first stable Rust version, the C++20 standard revision has finally decided to soft-deprecate standard C++ iterators in favor of a Rust-like iterator abstraction, confusingly calling it a “range” since the “iterator” name was already taken.1
Another advantage of the Rust iterator model is that because Rust iterator
objects are self-sufficient, they can implement methods that transform an
iterator object in various ways. The Rust Iterator trait heavily leverages
this possibility, providing dozens of
methods
that are automatically implemented for every standard and user-defined iterator
type, even though the default implementations can be overriden for performance.
Most of these methods consume the input iterator and produce a different iterator as an output. These methods are commonly called “adapters”. Here is an example of one of them in action:
#![allow(unused)] fn main() { // Turn an integer range into an iterator, then transform the iterator to only // yield one element every 10 elements. for i in (0..100).into_iter().step_by(10) { println!("i = {i}"); } }
One major property of these iterator adapters is that they operate lazily: transformations are performed on the fly as new iterator elements are generated, without needing to collect transformed data in intermediary collections. Because compilers are bad at optimizing out memory allocations and data movement, this way of operating is a lot better than generating temporary collections from a performance point of view, to the point where code that uses iterator adapters usually compiles down to the same assembly as an optimal hand-written while loop.
For reasons that will be explained over the next parts of this course, usage of iterator adapters is very common in idiomatic Rust code, and generally preferred over equivalent imperative programming constructs unless the latter provide a significant improvement in code readability.
Arrays and Vecs
It is not just integer ranges that can be iterated over. Two other iterable Rust
objects of major interest to numerical computing are arrays and Vecs.
They are very similar to std::array and std::vector in C++:
- The storage for array variables is fully allocated on the stack.2 In
contrast, the storage for a
Vec’s data is allocated on the heap, using the Rust equivalent ofmalloc()andfree(). - The size of an array must be known at compile time and cannot change during
runtime. In contrast, it is possible to add and remove elements to a
Vec, and the underlying backing store will be automatically resized through memory reallocations and copies to accomodate this. - It is often a bad idea to create and manipulate large arrays because they can
overflow the program’s stack (resulting in a crash) and are expensive to move
around. In contrast,
Vecs will easily scale as far as available RAM can take you, but they are more expensive to create and destroy, and accessing their contents may require an extra pointer indirection. - Because of the compile-time size constraint, arrays are generally less
ergonomic to manipulate than
Vecs. ThereforeVecshould be your first choice unless you have a good motivation for using arrays (typically heap allocation avoidance).
There are three basic ways to create a Rust array…
- Directly provide the value of each element:
[1, 2, 3, 4, 5]. - State that all elements have the same value, and how many elements there are:
[42; 6]is the same as[42, 42, 42, 42, 42, 42]. - Use the
std::array::from_fnstandard library function to initialize each element based on its position within the array.
…and Vecs supports the first two initialization method via the vec! macro,
which uses the same syntax as array literals:
#![allow(unused)] fn main() { let v = vec![987; 12]; }
However, there is no equivalent of std::array::from_fn for Vec, as it is
replaced by the superior ability to construct Vecs from either iterators or
C++-style imperative code:
#![allow(unused)] fn main() { // The following three declarations are rigorously equivalent, and choosing // between them is just a matter of personal preference. // Here, we need to tell the compiler that we're building a Vec, but we can let // it infer the inner data type. let v1: Vec<_> = (123..456).into_iter().collect(); let v2 = (123..456).into_iter().collect::<Vec<_>>(); let mut v3 = Vec::with_capacity(456 - 123 + 1); for i in 123..456 { v3.push(i); } assert_eq!(v1, v2); assert_eq!(v1, v3); }
In the code above, the Vec::with_capacity constructor plays the same role as
the reserve() method of C++’s std::vector: it lets you tell the Vec
implementation how many elements you expect to push() upfront, so that said
implementation can allocate a buffer of the right length from the beginning and
thus avoid later reallocations and memory movement on push().
And as hinted during the beginning of this section, both arrays and Vecs
implement IntoIterator, so you can iterate over their elements:
#![allow(unused)] fn main() { for elem in [1, 3, 5, 7] { println!("{elem}"); } }
Indexing
Following the design of most modern programming languages, Rust lets you access array elements by passing a zero-based integer index in square brackets:
#![allow(unused)] fn main() { let arr = [9, 8, 5, 4]; assert_eq!(arr[2], 5); }
However, unlike in C/++, accessing arrays at an invalid index does not result in undefined behavior that gives the compiler license to arbitrarily trash your program. Instead, the thread will just deterministically panic, which by default will result in a well-controlled program crash.
Unfortunately, this memory safety does not come for free. The compiler has to insert bounds-checking code, which may or may not later be removed by its optimizer. When they are not optimized out, these bound checks tend to make array indexing a fair bit more expensive from a performance point of view in Rust than in C/++.
And this is actually one of the many reasons to prefer iteration over manual
array and Vec indexing in Rust. Because iterators access array elements using a
predictable and known-valid pattern, they can work without bound checks.
Therefore, they can be used to achieve C/++-like performance, without relying on
faillible compiler optimizations or unsafe code in your program.3 And
another major benefit is obviously that you cannot crash your program by using
iterators wrong.
But for those cases where you do need some manual indexing, you will likely
enjoy the enumerate() iterator adapter, which gives each iterator element an
integer index that starts at 0 and keeps growing. It is a very convenient tool
for bridging the iterator world with the manual indexing world:
#![allow(unused)] fn main() { // Later in the course, you will learn a better way of doing this let v1 = vec![1, 2, 3, 4]; let v2 = vec![5, 6, 7, 8]; for (idx, elem) in v1.into_iter().enumerate() { println!("v1[{idx}] is {elem}"); println!("v2[{idx}] is {}", v2[idx]); } }
Slicing
Sometimes, you need to extract not just one array element, but a subset of array elements. For example, in the Gray-Scott computation that we will be working on later on in the course, you will need to work on sets of 3 consecutive elements from an input array.
The simplest tool that Rust provides you to deal with this situation is slices, which can be built using the following syntax:
#![allow(unused)] fn main() { let a = [1, 2, 3, 4, 5]; let s = &a[1..4]; assert_eq!(s, [2, 3, 4]); }
Notice the leading &, which means that we take a reference to the original
data (we’ll get back to what this means in a later chapter), and the use of
integer ranges to represent the set of array indices that we want to extract.
If this reminds you of C++20’s std::span, this is no coincidence. Spans are
another of many instances of C++20 trying to catch up with Rust features from 5
years ago.
Manual slice extraction comes with the same pitfalls as manual indexing (costly bound checks, crash on error…), so Rust obviously also provides iterators of slices that don’t have this problem. The most popular ones are…
chunks()andchunk_exact(), which cut up your array/vec into a set of consecutive slices of a certain length and provide an iterator over these slices.- For example,
chunks(2)would yield elements at indices0..2,2..4,4..6, etc. - They differ in how they handle trailing elements of the array.
chunks_exact()compiles down to more efficient code, but is a bit more cumbersome to use because you need to handle trailing elements using a separate code path.
- For example,
windows(), where the iterator yields overlapping slices, each shifted one array/vec element away from the previous one.- For example,
windows(2)would yield elements at indices0..2,1..3,2..4, etc. - This is exactly the iteration pattern that we need for discrete convolution, which the school’s flagship Gray-Scott reaction computation is an instance of.
- For example,
All these methodes are not just restricted to arrays and Vecs, you can just as
well apply them to slices, because they are actually methods of the slice
type to begin with. It just
happens that Rust, through some compiler magic,4 allows you to call slice
type methods on arrays and Vecs, as if they were the equivalent
all-encompassing &v[..] slice.
Therefore, whenever you are using arrays and Vecs, the documentation of the
slice type is also worth keeping around. Which is why the official documentation
helps you at this by copying it into the documentation of the
array and
Vec types.
Exercise
Now, go to your code editor, open the examples/03-looping.rs source file, and
address the TODOs in it. The code should compile and runs successfully at the
end.
To attempt to compile and run the file after making corrections, you may use the following command in the VSCode terminal:
cargo run --example 03-looping
It may be worth pointing out that replacing a major standard library abstraction like this in a mature programming language is not a very wise move. 4 years after the release of C++20, range support in the standard library of major C++ compilers is still either missing or very immature and support in third-party C++ libraries is basically nonexistent. Ultimately, C++ developers will unfortunately be the ones paying the price of this standard commitee decision by needing to live with codebases that confusingly mix and match STL iterators and ranges for many decades to come. This is just one little example, among many others, of why attempting to iteratively change C++ in the hope of getting it to the point where it matches the ergonomics of Rust, is ultimately a futile evolutionary dead-end that does the C++ community more harm than good…
When arrays are used as e.g. struct members, they are allocated
inline, so for example an array within a heap-allocated struct is part
of the same allocation as the hosting struct.
Iterators are themselves implemented using unsafe, but that’s the
standard library maintainers’ problem to deal with, not yours.
Cough cough
Deref trait cough
cough.
Squaring
As you could see if you did the previous set of exercises, we have already covered enough Rust to start doing some actually useful computations.
There is still one important building block that we are missing to make the most of Rust iterator adapters, however, and that is anonymous functions, also known as lambda functions or lexical closures in programming language theory circles.
In this chapter, we will introduce this language feature, and show how it can be used, along with Rust traits and the higher-order function pattern, to compute the square of every element of an array using fully idiomatic Rust code.
Meet the lambda
In Rust, you can define a function anywhere, including inside of another
function1. Parameter types are specified using the same syntax as variable
type ascription, and return types can be specified at the end after a -> arrow
sign:
#![allow(unused)] fn main() { fn outsourcing(x: u8, y: u8) { fn sum(a: u8, b: u8) -> u8 { // Unlike in C/++, return statements are unnecessary in simple cases. // Just write what you want to return as a trailing expression. a + b } println!("{}", sum(x, y)); } }
However, Rust is not Python, and inner function definitions cannot capture variables from the scope of outer function definitions. In other words, the following code does not compile:
#![allow(unused)] fn main() { fn outsourcing(x: u8, y: u8) { fn sum() -> u8 { // ERROR: There are no "x" and "y" variables in this scope. x + y } println!("{}", sum()); } }
Rust provides a slightly different abstraction for this, namely anonymous functions aka lambdas aka closures. In addition to being able to capture surrounding variables, these also come with much lighter-weight syntax for simple use cases…
#![allow(unused)] fn main() { fn outsourcing(x: u8, y: u8) { let sum = || x + y; // Notice that the "-> u8" return type is inferred. // If you have parameters, their type is also inferred. println!("{}", sum()); } }
…while still supporting the same level of type annotation sophistication as full function declarations, should you need it for type inference or clarity:
#![allow(unused)] fn main() { fn outsourcing(x: u8, y: u8) { let sum = |a: u8, b: u8| -> u8 { a + b }; println!("{}", sum(x, y)); } }
The main use case for lambda functions, however, is interaction with higher-order functions: functions that take other functions as inputs and/or return other functions as output.
A glimpse of Rust traits
We have touched upon the notion of traits several time before in this course, without taking the time to really explain it. That’s because Rust traits are a complex topic, which we do not have the luxury of covering in depth in this short 1 day course.
But now that we are getting to higher-order functions, we are going to need to interact a little bit more with Rust traits, so this is a good time to expand a bit more on what Rust traits do.
Traits are the cornerstone of Rust’s genericity and polymorphism system. They let you define a common protocol for interacting with several different types in a homogeneous way. If you are familiar with C++, traits in Rust can be used to replace any of the following C++ features:
- Virtual methods and overrides
- Templates and C++20 concepts, with first-class support for the “type trait” pattern
- Function and method overloading
- Implicit conversions
The main advantage of having one single complex general-purpose language feature like this, instead of many simpler narrow-purpose features, is that you do not need to deal with interactions between the narrow-purpose features. As C++ practicioners know, these can be result in quite surprising behavior and getting their combination right is a very subtle art.
Another practical advantage is that you will less often hit a complexity wall, where you hit the limits of the particular language feature that you were using and must rewrite large chunks code in terms of a completely different language feature.
Finally, Rust traits let you do things that are impossible in C++. Such as adding methods to third-party types, or verifying that generic code follows its intended API contract.
If you are a C++ practicioner and just started thinking "hold on, weren't C++20 concepts supposed to fix this generics API contract problem?", please click on the arrow for a full explanation.
Let us assume that you are writing a generic function and claim that it works with any type that has an addition operator. The Rust trait system will check that this is indeed the case as the generic code is compiled. Should you use any other type operation like, say, the multiplication operator, the compiler will error out during the compilation of the generic code, and ask you to either add this operation to the generic function’s API contract or remove it from its implementation.
In contrast, C++20 concepts only let you check that the type parameters that generic code is instantiated with match the advertised contract. Therefore, in our example scenario, the use of C++20 concepts will be ineffective, and the compilation of the generic code will succeed in spite of the stated API contract being incorrect.
It is only later, as someone tries to use your code with a type that has an addition operator but no multiplication operator (like, say, a linear algebra vector type that does not use
operator*for the dot product), that an error will be produced deep inside of the implementation of the generic code.The error will point at the use of the multiplication operator by the implementation of the generic code. Which may be only remotely related to what the user is trying to do with your library, as your function may be a small implementation detail of a much bigger functionality. It may thus take users some mental gymnastics to figure out what’s going on. This is part of why templates have a bad ergonomics reputation in C++, the other part being that function overloading as a programming language feature is fundamentally incompatible with good compiler error messages.
And sadly this error is unlikely to be caught during your testing because generic code can only be tested by instantitating it with specific types. As an author of generic code, you are unlikely to think about types with an addition operator but no multiplication operator, since these are relatively rare in programming.
To summarize, unlike C++20 concepts, Rust traits are actually effective at making unclear compiler error messages deep inside of the implementation of generic code a thing of the past. They do not only work under the unrealistic expectation that authors of generic code are perfectly careful to type in the right concepts in the signature of generic code, and to keep the unchecked concept annotations up to date as the generic code’s implementation evolves2.
Higher order functions
One of Rust’s most important traits is the
Fn trait, which is
implemented for types that can be called like a function. It also has a few
cousins that we will cover later on.
Thanks to special treatment by the compiler3, the Fn trait is actually a
family of traits that can be written like a function signature, without
parameter names. So for example, an object of a type that implements the
Fn(i16, f32) -> usize trait can be called like a function, with two parameters
of type i16 and f32, and the call will return a result of type usize.
You can write a generic function that accepts any object of such a type like this…
#![allow(unused)] fn main() { fn outsourcing(op: impl Fn(i16, f32) -> usize) { println!("The result is {}", op(42, 4.2)); } }
…and it will accept any matching callable object, including both regular functions, and closures:
#![allow(unused)] fn main() { fn outsourcing(op: impl Fn(i16, f32) -> usize) { println!("The result is {}", op(42, 6.66)); } // Example with a regular function fn my_op(x: i16, y: f32) -> usize { (x as f32 + 1.23 * y) as usize } outsourcing(my_op); // Example with a closure outsourcing(|x, y| { println!("x may be {x}, y may be {y}, but there is only one answer"); 42 }); }
As you can see, closures shine in this role by keeping the syntax lean and the code more focused on the task at hand. Their ability to capture environment can also be very powerful in this situation, as we will see in later chapters.
You can also use the impl Trait syntax as the return type of a function, in
order to state that you are returning an object of a type that implements a
certain trait, without specifying what the trait is.
This is especially useful when working with closures, because the type of a closure object is a compiler-internal secret that cannot be named by the programmer:
#![allow(unused)] fn main() { /// Returns a function object with the signature that we have seen so far fn make_op() -> impl Fn(i16, f32) -> usize { |x, y| (x as f32 + 1.23 * y) as usize } }
By combining these two features, Rust programmers can very easily implement any
higher-order function that takes a function as a parameter or returns a
function as a result. And because the code of these higher-order functions is
specialized for the specific function type that you’re dealing with at compile
time, runtime performance can be much better than when using dynamically
dispatched higher-order function abstractions in other languages, like
std::function in C++4.
Squaring numbers at last
The Iterator trait provides a number of methods that are actually higher-order
functions. The simpler of them is the map method, which consumes the input
iterator, takes a user-provided function, and produces an output iterator whose
elements are the result of applying the user-provided function to each element
of the input iterator:
#![allow(unused)] fn main() { let numbers = [1.2f32, 3.4, 5.6]; let squares = numbers.into_iter() .map(|x| x.powi(2)) .collect::<Vec<_>>(); println!("{numbers:?} squared is {squares:?}"); }
And thanks to good language design and heroic optimization work by the Rust compiler team, the result will be just as fast as hand-optimized assembly for all but the smallest input sizes5.
Exercise
Now, go to your code editor, open the examples/04-square-one.rs source file,
and address the TODOs in it. The code should compile and runs successfully at
the end.
To attempt to compile and run the file after making corrections, you may use the following command in the VSCode terminal:
cargo run --example 04-square-one
This reflects a more general Rust design choice of letting almost everything be declared almost anywhere, for example Rust will happily declaring types inside of functions, or even inside of value expressions.
You may think that this is another instance of the C++ standardization commitee painstakingly putting together a bad clone of a Rust feature as an attempt to play catch-up 5 years after the first stable release of Rust. But that is actually not the case. C++ concepts have been in development for more than 10 years, and were a major contemporary inspiration for the development of Rust traits along with Haskell’s typeclasses. However, the politically dysfunctional C++ standardization commitee failed to reach an agreement on the original vision, and had to heavily descope it before they succeeded at getting the feature out of the door in C++20. In contrast, Rust easily succeeded at integrating a much more ambitious generics API contract system into the language. This highlights once again the challenges of integrating major changes into an established programming language, and why the C++ standardization commitee might actually better serve C++ practicioners by embracing the “refine and polish” strategy of its C and Fortran counterparts.
There are a number of language entities like this that get special treatment by the Rust compiler. This is done as a pragmatic alternative to spending more time designing a general version that could be used by library authors, but would get it in the hands of Rust developers much later. The long-term goal is to reduce the number of these exceptions over time, in order to give library authors more power and reduce the amount of functionality that can only be implemented inside of the standard library.
Of course, there is no free lunch in programming, and all this
compile-time specialization comes at the cost. As with C++ templates, the
compiler must effectively recompile higher-order functions that take
functions as a parameter for each input function that they’re called with.
This will result in compilation taking longer, consuming more RAM, and
producing larger output binaries. If this is a problem and the runtime
performance gains are not useful to your use case, you can use dyn Trait
instead of impl Trait to switch to dynamic dispatch, which works much
like C++ virtual methods. But that is beyond the scope of this short
course.
To handle arrays smaller than about 100 elements optimally, you will need to specialize the code for the input size (which is possible but beyond the scope of this course) and make sure the input data is optimally aligned in memory for SIMD processing (which we will cover later on).
Hadamard
So far, we have been iterating over a single array/Vec/slice at a time. And
this already took us through a few basic computation patterns. But we must not
forget that with the tools introduced so far, jointly iterating over two Vecs
at the same time still involves some pretty yucky code:
#![allow(unused)] fn main() { let v1 = vec![1, 2, 3, 4]; let v2 = vec![5, 6, 7, 8]; for (idx, elem) in v1.into_iter().enumerate() { println!("v1[{idx}] is {elem}"); // Ew, manual indexing with bound checks and panic risks... :( println!("v2[{idx}] is {}", v2[idx]); } }
Thankfully, there is an easy fix called zip(). Let’s use it to implement the
Hadamard product!
Combining iterators with zip()
Iterators come with an adapter method called zip(). Like for loops, this
method expects an object of a type that implements IntoInterator. What it does
is to consume the input iterator, turn the user-provided object into an
interator, and return a new iterator that yields pairs of elements from both the
original iterator and the user-provided iterable object:
#![allow(unused)] fn main() { let v1 = vec![1, 2, 3, 4]; let v2 = vec![5, 6, 7, 8]; /// Iteration will yield (1, 5), (2, 6), (3, 7) and (4, 8) for (x1, x2) in v1.into_iter().zip(v2) { println!("Got {x1} from v1 and {x2} from v2"); } }
Now, if you have used the zip() method of any other programming language for
numerics before, you should have two burning questions:
- What happens if the two input iterators are of different length?
- Is this really as performant as a manual indexing-based loop?
To the first question, other programming languages have come with three typical answers:
- Stop when the shortest iterator stops, ignoring remaining elements of the other iterator.
- Treat this as a usage error and report it using some error handling mechanism.
- Make it undefined behavior and give the compiler license to randomly trash the program.
As you may guess, Rust did not pick the third option. It could reasonably have
picked the second option, but instead it opted to pick the first option. This
was likely done because error handling comes at a runtime performance cost, that
was not felt to be acceptable for this common performance-sensitive operation
where user error is rare. But should you need it, option 2 can be easily built
as a third-party library, and is therefore available via the popular
itertools crate.
Speaking of performance, Rust’s zip() is, perhaps surprisingly, usually just
as good as a hand-tuned indexing loop1. It does not exhibit the runtime
performance issues that were discussed in the C++ course when presenting C++20’s
range-zipping operations2. And it will especially be often highly superior to
manual indexing code, which come with a risk of panics and makes you rely on the
black magic of compiler optimizations to remove indexing-associated bound
checks. Therefore, you are strongly encouraged to use zip() liberally in your
code!
Hadamard product
One simple use of zip() is to implement the Hadamard vector product.
This is one of several different kinds of products that you can use in linear algebra. It works by taking two vectors of the same dimensionality as input, and producing a third vector of the same dimensionality, which contains the pairwise products of elements from both input vectors:
#![allow(unused)] fn main() { fn hadamard(v1: Vec<f32>, v2: Vec<f32>) -> Vec<f32> { assert_eq!(v1.len(), v2.len()); v1.into_iter().zip(v2) .map(|(x1, x2)| x1 * x2) .collect() } assert_eq!( hadamard(vec![1.2, 3.4, 5.6], vec![9.8, 7.6, 5.4]), [ 1.2 * 9.8, 3.4 * 7.6, 5.6 * 5.4 ] ); }
Exercise
Now, go to your code editor, open the examples/05-hadamantium.rs source file,
and address the TODOs in it. The code should compile and runs successfully at
the end.
To attempt to compile and run the file after making corrections, you may use the following command in the VSCode terminal:
cargo run --example 05-hadamantium
This is not to say that the hand-tuned indexing loop is itself perfect. It will inevitably suffer from runtime performance issues caused by suboptimal data alignment. But we will discuss how to solve this problem and achieve optimal Hadamard product performance after we cover data reductions, which suffer from much more severe runtime performance problems that include this one among many others.
The most likely reason why this is the case is that Rust pragmatically
opted to make tuples a primitive language type that gets special support
from the compiler, which in turn allows the Rust compiler to give its LLVM
backend very strong hints about how code should be generated (e.g. pass
tuple elements via CPU registers, not stack pushes and pops that may or
may not be optimized out by later passes). On its side, the C++
standardization commitee did not do this because they cared more about
keeping std::tuple a library-defined type that any sufficiently
motivated programmer could re-implement on their own given an infinite
amount of spare time. This is another example, if needed be, that even
though both the C++ and Rust community care a lot about giving maximal
power to library writers and minimizing the special nature of their
respective standard libraries, it is important to mentally balance the
benefits of this against the immense short-term efficiency of letting the
compiler treat a few types and functions specially. As always, programming
language design is all about tradeoffs.
Sum and dot
All the computations that we have discussed so far are, in the jargon of SIMD programming, vertical operations. For each element of the input arrays, they produce zero or one matching output array element. From the perspective of software performance, these vertical operations are the best-case scenario, and compilers know how to produce very efficient code out of them without much assistance from the programmer. Which is why we have not discussed performance much so far.
But in this chapter, we will now switch our focus to horizontal operations, also known as reductions. We will see why these operations are much more challenging to compiler optimizers, and then the next few chapters will cover what programmers can do to make them more efficient.
Summing numbers
One of the simplest reduction operations that one can do with an array of floating-point numbers is to compute the sum of the numbers. Because this is a common operation, Rust iterators make it very easy by providing a dedicated method for it:
#![allow(unused)] fn main() { let sum = [1.2, 3.4, 5.6, 7.8].into_iter().sum::<f32>(); }
The only surprising thing here might be the need to spell out the type of the sum. This need does not come up because the compiler does not know about the type of the array elements that we are summing. That could be handled by the default “unknown floats are f64” fallback.
The problem is instead that the sum function is generic in order to be able to work with both numbers and reference to numbers (which we have not covered yet, but will soon enough, for now think of them as C pointers). And wherever there is genericity in Rust, there is loss of type inference.
Dot product
Once we have zip(), map() and sum(), it takes only very little work to
combine them in order to implement a simple Euclidean dot product:
#![allow(unused)] fn main() { let x = [1.2f32, 3.4, 5.6, 7.8]; let y = [9.8, 7.6, 5.4, 3.2]; let dot = x.into_iter().zip(y) .map(|(x, y)| x * y) .sum::<f32>(); }
Hardware-minded people, however, may know that we are leaving some performance and floating-point precision on the table by doing it like this. Modern CPUs come with fused multiply-add operations that are as costly as an addition or multiplication, and do not round between the multiplication and addition which results in better output precision.
Rust exposes these hardware operations1, and we can use them by switching to
a more general cousin of sum() called fold():
#![allow(unused)] fn main() { let x = [1.2f32, 3.4, 5.6, 7.8]; let y = [9.8, 7.6, 5.4, 3.2]; let dot = x.into_iter().zip(y) .fold(0.0, |acc, (x, y)| x.mul_add(y, acc)); }
Fold works by initializing an accumulator variable with a user-provided value, and then going through each element of the input iterator and integrating it into the accumulator, each time producing an updated accumulator. In other words, the above code is equivalent to this:
#![allow(unused)] fn main() { let x = [1.2f32, 3.4, 5.6, 7.8]; let y = [9.8, 7.6, 5.4, 3.2]; let mut acc = 0.0; for (x, y) in x.into_iter().zip(y) { acc = x.mul_add(y, acc); } let dot = acc; }
And indeed, the iterator fold method optimizes just as well as the above imperative code, resulting in identical generate machine code. The problem is that unfortunately, that imperative code itself is not ideal and will result in very poor computational performance. We will now show how to quantify this problem, and then explain why it happens and what you can do about it.
Setting up criterion
The need for criterion
With modern hardware, compiler and operating systems, measuring the performance of short-running code snippets has become a fine art that requires a fair amount of care.
Simply surrounding code with OS timer calls and subtracting the readings may have worked well many decades ago. But nowadays it is often necessary to use specialized tooling that leverages repeated measurements and statistical analysis, in order to get stable performance numbers that truly reflect the code’s performance and are reproducible from one execution to another.
The Rust compiler has built-in tools for this, but unfortunately they are not
fully exposed by stable versions at the time of writing, as there is a
longstanding desire to clean up and rework some of the associated APIs before
exposing them for broader use. As a result, third-party libraries should be used
for now. In this course, we will be mainly using
criterion as it is
by far the most mature and popular option available to Rust developers
today.2
Adding criterion to a project
Because criterion is based on the Rust compiler’s benchmarking infrastructure,
but cannot fully use it as it is not completely stabilized yet, it does
unfortunately require a fair bit of unclean setup. First you must add a
dependency on criterion in your Rust project. For network policy reasons, we
have already done this for you in the example source code. But for your
information, it is done using the following command:
cargo add --dev criterion
cargo add is an easy-to-use tool for editing your Rust project’s Cargo.toml
configuration file in order to register a dependency on (by default) the latest
version of some library. With the --dev option, we specify that this
dependency will only be used during development, and should not be included in
production builds, which is the right thing to do for a benchmarking harness.
After this, every time we add a benchmark to the application, we will need to
manually edit the Cargo.toml configuration file in order to add an entry that
disables the Rust compiler’s built-in benchmark harness. This is done so that it
does not interfere with criterion’s work by erroring out on criterion-specific
CLI benchmark options that it does not expect. The associated Cargo.toml
configuration file entry looks like this:
[[bench]]
name = "my_benchmark"
harness = false
Unfortunately, this is not yet enough, because benchmarks can be declared pretty
much anywhere in Rust. So we must additionally disable the compiler’s built-in
benchmark harness on every other binary defined by the project. For a simple
library project that defines no extra binaries, this extra Cargo.toml
configuration entry should do it:
[lib]
bench = false
It is only after we have done all of this setup, that we can get criterion
benchmarks that will reliably accept our CLI arguments, no matter how they were
started.
A benchmark skeleton
Now that our Rust project is set up properly for benchmarking, we can start
writing a benchmark. First you need to create a benches directory in
your project if it does not already exists, and create a source file there,
named however you like with a .rs extension.
Then you must add the criterion boilerplate to this source file, which is
partially automated using macros, in order to get a runnable benchmark that
integrates with the standard cargo bench tool…
use criterion::{black_box, criterion_group, criterion_main, Criterion};
pub fn criterion_benchmark(c: &mut Criterion) {
// This is just an example benchmark that you can freely delete
c.bench_function("sqrt 4.2", |b| b.iter(|| black_box(4.2).sqrt()));
}
criterion_group!(benches, criterion_benchmark);
criterion_main!(benches);…and finally you must add the aforementioned Cargo.toml boilerplate so that
criterion CLI arguments keep working as expected. Assuming you unimaginatively
named your benchmark source file “benchmark.rs”, this would be…
[[bench]]
name = "benchmark"
harness = false
Writing a good microbenchmark
There are a few basic rules that you should always follow whenever you are writing a microbenchmark that measures the performance of a small function in your code, if you do not want the compiler’s optimizer to transform your benchmark in unrealistic ways:
- Any input value that is known to the compiler’s optimizer can be used to tune
the code specifically for this input value, and sometimes even to reduce the
benchmarking loop to a single iteration by leveraging the fact that the
computation always operate on the same input. Therefore, you must always hide
inputs from the compiler’s optimizer using an optimization barrier such as
criterion’sblack_box(). - Any output value that is not used in any way is a useless computation in the
eyes of the compiler’s optimizer. Therefore, the compiler’s optimizer will
attempt to delete any code that is involved in the computation of such values.
To avoid this, you will want again to feed results into an optimization
barrier like
criterion’sblack_box().criterionimplicitly does this for any output value that you return from theiter()API’s callback.
It’s not just about the compiler’s optimizer though. Hardware and operating systems can also leverage the regular nature of microbenchmarks to optimize performance in unrealistic ways, for example CPUs will exhibit an unusually good cache hit rate when running benchmarks that always operate on the same input values. This is not something that you can guard against, just a pitfall that you need to keep in mind when interpreting benchmark results: absolute timings are usually an overly optimistic estimate of your application’s performance, and therefore the most interesting output of microbenchmarks is actually not the raw result but the relative variations of this result when you change the code that is being benchmarked.
Finally, on a more fundamental level, you must understand that on modern
hardware, performance usually depends on problem size in a highly nonlinear and
non-obvious manner. It is therefore a good idea to test the performance of your
functions over a wide range of problem sizes. Geometric sequences of problem
sizes like [1, 2, 4, 8, 16, 32, ...] are often a good default choice.
Exercise
Due to Rust benchmark harness design choices, the exercise for this chapter
will, for once, not take place in the examples subdirectory of the exercises’
source tree.
Instead, you will mainly work on the benches/06-summit.rs source file, which
is a Criterion benchmark that was created using the procedure described above.
Implement the sum() function within this benchmark to make it sum the elements
of its input Vec, then run the benchmark with cargo bench --bench 06-summit.
To correctly interpret the results, you should know that a single core of a modern x86 CPU, with a 2 GHz clock rate and AVX SIMD instructions, can perform 32 billion f32 sums per second.3
Technically, at this stage of our performance optimization journey, we can
only use these operations via a costly libm function call. This happens
because not all x86_64 CPUs support the fma instruction family, and the
compiler has to be conservative in order to produce code that runs
everywhere. Later, we will see how to leverage modern hardware better
using the multiversion crate.
Although criterion would be my recommendation today due to its
feature-completeness and popularity, divan is
quickly shaping up into an interesting alternative that might make it the
recommendation in a future edition of this course. Its benefits over
criterion include significantly improved API ergonomics, faster
measurements, and better support for code that is generic over
compile-time quantities aka “const generics”.
Recent Intel CPUs (as of 2024) introduced the ability to perform a third SIMD sum per clock cycle, which bumps the theoretical limit to 48 billion f32 sums per second per 2 GHz CPU core.
Ownership
If you played with the example float squaring benchmark of the last chapter before replacing it with a float summing benchmark, you may have noticed that its performance was already quite bad. Half a nanosecond per vector element may not sound like much, but when we’re dealing with CPUs that can process tens of multiplications in that time, it’s already something to be ashamed of.
The reason why this happens is that our benchmark does not just square floats as
it should, it also generates a full Vec of them on every iteration. That’s not
a desirable feature, as it shifts benchmark numbers away from what we are trying
to measure, so in this chapter we will study the ownership and borrowing
features of Rust that will let us to reuse input vectors and stop doing this.
Some historical context
RAII in Rust and C++
Rust relies on the Resource Acquisition Is Initialization (RAII) pattern in order to automatically manage system resources like heap-allocated memory. This pattern was originally introduced by C++, and for those unfamiliar with it, here is a quick summary of how it works:
- In modern structured programming languages, variables are owned by a certain code scope. Once you exit this scope, the variable cannot be named or otherwise accessed anymore. Therefore, the state of the variable has become unobservable to the programmer, and compilers and libraries should be able to do arbitrary things to it without meaningfully affecting the observable behavior of the program.
- Library authors can leverage this scoping structure by defining destructor functions1, which are called when a variable goes out of scope. These functions are used to clean up all system state associated with the variable. For example, a variable that manages a heap allocation would use it to deallocate the associated, now-unreachable heap memory.
Move semantics and its problems in C++
One thing which historical C++ did not provide, however, was an efficient way to
move a resource from one scope to another. For example, returning RAII types
from functions could only be made efficient through copious amounts of brittle
compiler optimizer black magic. This was an undesirable state of affair, so
after experimenting with several bad solutions including
std::auto_ptr, the C++
standardization commitee finally came up with a reasonable fix in C++11, called
move semantics.
The basic idea of move semantics is that it should be possible to transfer ownership of one system resource from one variable to another. The original variable would lose access to the resource, and give up on trying to liberate it once its scope ends. While the new variable would gain access to the resource, and become the one responsible for liberating it. Since the two variables involved can be in different scopes, this could be used to resolve the function return problem, among others.
Unfortunately, C++ move semantics were also heavily overengineered and bolted onto a 26-years old programming language standard, with the massive user base and the backwards compatibility constraints that come with it. As a result, the design was made so complicated and impenetrable that even today, few C++ developers will claim to fully understand how it works. One especially bad design decision, in retrospect, was the choice to make move semantics an opt-in feature that each user-defined types had to individually add support for. Predictably, few types in the ecosystem did, and as a result C++ move semantics have mostly become an experts-only feature that you will be very lucky to see working as advertised on anything but toy code examples.
How Rust fixed move semantics
By virtue of being first released 4 years after C++11, Rust could learn from these mistakes, and embrace a complete redesign of C++ move semantics that is easier to understand and use, safer, and reliably works as intended. More specifically, Rust move semantics improved upon C++11 by leveraging the following insight:
- C++11 move semantics have further exacerbated the dangling pointer memory safety problems that had been plaguing C++ for a long time, by adding a new dangling variable problem in the form of moved-from variables. There was a pressing need to find a solution to this new problem, that could ideally also address the original problem.
- Almost every use case of C++ move constructors and move assignment operators
could be covered by
memcpy()-ing the bytes of the original variable into the new variable and ensuring that 1/the original variable cannot be used anymore and 2/its destructor will never run. By restricting the scope of move operations like this, they could be automatically and universally implemented for every Rust type without any programmer intervention. - For types which do not manage resources, restricting access to the original variable would be overkill, and keeping it accessible after the memory copy is fine. The two copies are independent and can freely each move on its separate way.
Moving and copying
In the general case, using a Rust value moves it. Once you have assigned the value to a variable to another, passed it to a function, or used it in any other way, you cannot use the original variable anymore. In other words, the following code snippets are all illegal in Rust:
#![allow(unused)] fn main() { // Suppose you have a Vec defined like this... let v = vec![1.2, 3.4, 5.6, 7.8]; // You cannot use it after assigning it to another variable... let v2 = v; println!("{v:?}"); // ERROR: v has been moved from // ...and you cannot use it after passing it to a function fn f(v: Vec<f32>) {} f(v2); println!("{v2:?}"); // ERROR: v2 has been moved from }
Some value types, however, escape these restrictions by virtue of being safe to
memcpy(). For example, stack-allocated arrays do not manage heap-allocated
memory or any other system resource, so they are safe to copy:
#![allow(unused)] fn main() { let a = [1.2, 3.4, 5.6, 7.8]; let a2 = a; println!("{a2:?}"); // Fine, a2 is an independent copy of a fn f(a: [f32; 4]) {} f(a2); println!("{a2:?}"); // Fine, f received an independent copy of a2 }
Types that use this alternate logic can be identified by the fact that they
implement the Copy
trait. Other types which can be copied but not via a simple memcpy() must use
the explicit .clone() operation from the
Clone trait instead.
This ensures that expensive operations like heap allocations stand out in the
code, eliminating a classic performance pitfall of C++.2
#![allow(unused)] fn main() { let v = vec![1.2, 3.4, 5.6, 7.8]; let v2 = v.clone(); println!("{v:?}"); // Fine, v2 is an independent copy of v fn f(v: Vec<f32>) {} f(v2.clone()); println!("{v2:?}"); // Fine, f received an independent copy of v2 }
But of course, this is not good enough for our needs. In our motivating benchmarking example, we do not want to simply replace our benckmark input re-creation loop with a benchmark input copying loop, we want to remove the copy as well. For this, we will need references and borrowing.
References and borrowing
The pointer problem
It has been said in the past that every problem in programming can be solved by adding another layer of indirection, except for the problem of having too many layers of indirection.
Although this quote is commonly invoked when discussing API design, one has to wonder if the original author had programming language pointers and references in mind, given how well the quote applies to them. Reasoned use of pointers can enormously benefit a codebase, for example by improving the efficiency of data movement. But if you overuse pointers, your code will rapidly turn into a slow and incomprehensible mess of pointer spaghetti.
Many attempts have been made to improve upon this situation, with interest increasing as the rise of multithreading kept making things worse. Functional programming and communicating sequential processes are probably the two most famous examples. But most of these formal models came with very strong restrictions on how programs could be written, making each of them a poor choice for a large amount of applications that did not “fit the model”.
It can be argued that Rust is the most successful take at this problem from the 2010s, by virtue of managing to build a huge ecosystem over two simple but very far-reaching sanity rules:
- Any user-reachable reference must be safe to dereference
- Almost3 all memory can be either shared in read-only mode, or accessible for writing, but never both at the same time.
Shared references
In Rust, shared references are created by applying the ampersand & operator to
values. They are called shared references because they enable multiple variables
to share access to the same target:
#![allow(unused)] fn main() { // You can create as many shared references as you like... let v = vec![1.2, 3.4, 5.6, 7.8]; let rv1 = &v; let rv2 = rv1; // ...and they obviously implement Copy // Reading from all of them is fine println!("{v:?} {rv1:?} {rv2:?}"); }
If this syntax reminds you of how we extracted slices from arrays and vectors before, this is not a coincidence. Slices are one kind of Rust reference.
A reference cannot exit the scope of the variable that it points to. And a variable that has at least one reference pointing to it cannot be modified, moved, or go out of scope. More precisely, doing either of these things will invalidate the reference, so it is not allowed to use the reference after this happens. As a result, for the entire useful lifetime of a reference, its owner can assume that the reference’s target is valid and does not change, which is a very useful invariant to operate under when doing things like caching and lazy invalidation.
#![allow(unused)] fn main() { // This common C++ mistake is illegal in Rust: References can't exit data scope fn dangling() -> &f32 { let x = 1.23; &x } // Mutating shared data invalidates the references, so this is illegal too let mut data = 666; let r = &data; data = 123; println!("{r}"); // ERROR: r has been invalidated }
Mutable references
Shared references are normally3 read-only. You can read from them via either
the * dereference operator or the method call syntax that implicitly calls it,
but you cannot overwrite their target. For that you will need the mutable &mut
references:
#![allow(unused)] fn main() { let mut x = 123; let mut rx = &mut x; *rx = 666; }
Shared and mutable references operate like a compiler-verified reader-writer lock: at any point in time, data may be either accessible for writing by one code path or accessible for reading by any number of code paths.
An obvious loophole would be to access memory via the original variable. But much like shared references are invalidated when the original variable is written to, mutable references are invalidated when the original variable is either written to or read from. Therefore, code which has access to a mutable reference can assume that as long as the reference is valid, reads and writes which are made through it are not observable by any other code path or thread or execution.
This prevents Rust code from getting into situations like NumPy in Python, where modifying a variable in one place of the program can unexpectedly affect readouts from memory made by another code path thousands of lines of code away:
import numpy as np
a = np.array([1, 2, 3, 4])
b = a
# Much later, in a completely unrelated part of the program
b = np.zeros(4)
What does this give us?
In addition to generally making code a lot easier to reason about by preventing programmers from going wild with pointers, Rust references prevent many common C/++ pointer usage errors that result in undefined behavior, including but far from limited to:
- Null pointers
- Dangling pointers
- Misaligned pointers
- Iterator invalidation
- Data races between concurrently executing threads
Furthermore, the many type-level guarantees of references are exposed to the
compiler’s optimizer, which can leverage them to speed up the code under the
assumption that forbidden things do not happen. This means that, for example,
there is no need for C’s restrict keyword in Rust: almost3 every Rust
reference has restrict-like semantics without you needing to ask for it.
Finally, an ill-known benefit of Rust’s shared XOR mutable data aliasing model is that it closely matches the hardware-level MESI coherence protocol of CPU caches, which means that code which idiomatically follows the Rust aliasing model tends to exhibit excellent multi-threading performance, with fewer cache ping-pong problems.
At what cost?
The main drawback of Rust’s approach is that even though it is much more flexible than many previous attempts at making pointers easier to reason about, many existing code patterns from other programming languages still do not translate nicely to it.
So libraries designed for other programming languages (like GUI libraries) may be hard to use from Rust, and all novice Rust programmers inevitable go through a learning phase colloquially known as “fighting the borrow checker”, where they keep trying to do things that are against the rules before they full internalize them.
A further-reaching consequence is that many language and library entities need
to exist in up to three different versions in order to allow working with owned
values, shared references, and mutable references. For example, the Fn trait
actually has two cousins called FnMut and FnOnce:
-
The
Fntrait we have used so far takes a shared reference to the input function object. Therefore, it cannot handle closures that can mutate internal state, and this code is illegal:#![allow(unused)] fn main() { fn call_fn(f: impl Fn()) { f() } let mut state = 42; call_fn(|| state = 43); // ERROR: Can't call a state-mutating closure via Fn }The flip side to this is that the implementation of
call_fn()only needs a shared reference to f to call it, which give it maximal flexibility. -
The
FnMuttrait takes a mutable reference to the input function object. So it can handle the above closure, but now a mutable reference will be needed to call it, which is more restrictive.#![allow(unused)] fn main() { fn call_fn_mut(mut f: impl FnMut()) { f() } let mut state = 42; call_fn_mut(|| state = 43); // Ok, FnMut can handle state-mutating closure } -
The
FnOncetrait consumes the function object by value. Therefore, a function that implements this trait can only be called once. In exchange, there is even more flexibility on input functions, for example returning an owned value from the function is legal:#![allow(unused)] fn main() { fn call_fn_once(f: impl FnOnce() -> Vec<i16>) -> Vec<i16> { f() } let v = vec![1, 2, 3, 4, 5]; call_fn_once(|| v); // Ok, closure can move away v since it's only called once }
Similarly, we actually have not one, but up to three ways to iterate over the
elements of Rust collections, depending on if you want owned values
(into_iter()), shared references (iter()), or mutable references
(iter_mut()). And into_iter() itself is a bit more complicated than this
because if you call it on a shared reference to a collection, it will yield
shared references to elements, and if you call it on a mutable reference to a
collection, it will yield mutable references to elements.
And there is much more to this, such as the move keyword that can be used to
force a closure to capture state by value when it would normally capture it by
reference, allowing said closure to be easily sent to a different threads of
executions… sufficient to say, the value/&/&mut dichotomy runs deep into
the Rust API vocabulary and affects many aspects of the language and ecosystem.
References and functions
Rust’s reference and borrowing rules interact with functions in interesting ways. There are a few easy cases that you can easily learn:
- The function only takes references as input. This requires no special precautions, since references are guaranteed to be valid for the entire duration of their existence.
- The function takes only one reference as input, and returns a reference as output. The compiler will infer by default that the output reference probably comes from the input data, which is almost always true.
- The function returns references out of nowhere. This is only valid when returning references to global data, in any other case you should thank the Rust borrow checker for catching your dangling pointer bug.
The first two cases are handled by simply replicating the reference syntax in function parameter and return types, without any extra annotation…
#![allow(unused)] fn main() { fn forward_input_to_output(x: &i32) -> &i32 { x } }
…and the third case must be annotated with the 'static keyword to advertise
the fact that only global state belongs here:
#![allow(unused)] fn main() { fn global_ref() -> &'static f32 { &std::f32::consts::PI } }
But as soon as a function takes multiple references as input, and return one reference as an output, you need4 to specify which input(s) the output reference can comes from, as this affects how other code can use your function. Rust handles this need via lifetime annotations, which look like this:
#![allow(unused)] fn main() { fn output_tied_to_x<'a>(x: &'a i32, y: &f32) -> &'a i32 { x } }
Lifetime annotations as a language concept can take a fair amount of time to
master, so my advice to you as a beginner would be to avoid running into them at
the beginning of your Rust journey, even if it means sprinkling a few .clone()
here and there. It is possible to make cloning cheaper via reference counting if
need be, and this will save you from the trouble of attempting to learn all the
language subtleties of Rust at once. Pick your battles!
Exercise:
Modify the benchmark from the previous chapter so that input gets passed by reference, rather than by value. Measure performance again, and see how much it helped.
In Rust, this is the job of the
Drop trait.
The more experienced reader will have noticed that although this rule of
thumb works well most of the time, it has some corner cases. memcpy()
itself is cheap but not free, and copying large amount of bytes can easily
become more expensive than calling the explicit copy operator of some
types like reference-counted smart pointers. At the time where this course
chapter is written, there is an ongoing
discussion
towards addressing this by revisiting the Copy/Clone dichotomy in
future evolutions of Rust.
Due to annoying practicalities like reference counting and mutexes in multi-threading, some amount of shared mutability has to exist in Rust. However, the vast majority of the types that you will be manipulating on a daily basis either internally follow the standard shared XOR mutable rule, or expose an API that does. Excessive use of shared mutability by Rust programs is frowned upon as unidiomatic.
There is actually one last easy case involving methods from objects that
return references to the &self/&mut self parameter, but we will not
have time to get into this during this short course;
SIMD
Single Instruction Multiple Data, or SIMD, is a very powerful hardware feature which lets you manipulate multiple numbers with a single CPU instruction. This means that if you play your cards right, code that uses SIMD can be from 2x to 64x faster than code that doesn’t, depending on what hardware you are running on and what data type you are manipulating.
Unfortunately, SIMD is also a major pain in the bottom as a programmer, because the set of operations that you can efficiently perform using SIMD instructions is extremely limited, and the performance of these operations is extremely sensitive to hardware details that you are not used to caring about, such as data alignment, contiguity and layout.
Why won’t the compiler do it?
People new to software performance optimization are often upset when they learn that SIMD is something that they need to take care of. They are used to optimizing compilers acting as wonderful and almighty hardware abstraction layers that usually generate near-optimal code with very little programmer effort, and rightfully wonder why when it comes to SIMD, the abstraction layer fails them and they need to take the matter into their own hands.
Part of the answer lies in this chapter’s introductory sentences. SIMD instruction sets are an absolute pain for compilers to generate code for, because they are so limited and sensitive to detail that within the space of all possible generated codes, the code that will actually work and run fast is basically a tiny corner case that cannot be reached through a smooth, progressive optimization path. This means that autovectorization code is usually the hackiest, most special-case-driven part of an optimizing compiler codebase. And you wouldn’t expect such code to work reliably.
But there is another side to this story, which is the code that you wrote. Compilers forbid themselves from performing certain optimizations when it is felt that they would make the generated code too unrelated to the original code, and thus impossible to reason about. For example, reordering the elements of an array in memory is generally considered to be off-limits, and so is reassociating floating-point operations, because this changes where floating-point rounding approximations are performed. In sufficiently tricky code, shifting roundings around can make the difference between producing a fine, reasonably accurate numerical result on one side, and accidentally creating a pseudorandom floating-point number generator on the other side.
When it comes to summing arrays of floating point numbers, the second factor actually dominates. You asked the Rust compiler to do this:
#![allow(unused)] fn main() { fn sum_my_floats(v: &Vec<f32>) -> f32 { v.into_iter().sum() } }
…and the Rust compiler magically translated your code into something like this:
#![allow(unused)] fn main() { fn sum_my_floats(v: &Vec<f32>) -> f32 { let mut acc = 0.0; for x in v.into_iter() { acc += x; } acc } }
But that loop itself is actually not anywhere close to an optimal SIMD computation, which would be conceptually closer to this:
#![allow(unused)] fn main() { // This is a hardware-dependent constant, here picked for x86's AVX const HARDWARE_SIMD_WIDTH: usize = 8; fn simd_sum_my_floats(v: &Vec<f32>) -> f32 { let mut accs = [0.0; HARDWARE_SIMD_WIDTH]; let chunks = v.chunks_exact(HARDWARE_SIMD_WIDTH); let remainder = chunks.remainder(); // We are not doing instruction-level parallelism for now. See next chapter. for chunk in chunks { // This loop will compile into a single fast SIMD addition instruction for (acc, element) in accs.iter_mut().zip(chunk) { *acc += *element; } } for (acc, element) in accs.iter_mut().zip(remainder) { *acc += *element; } // This would need to be tuned for optimal efficiency at small input sizes accs.into_iter().sum() } }
…and there is simply no way to go from sum_my_floats to simd_sum_my_floats
without reassociating floating-point operations. Which is not a nice thing to do
behind the original code author’s back, for reasons that my colleague Vincent
Lafage and vengeful numerical computing god William
Kahan will be able to explain much
better than I can.
All this to say: yes there is unfortunately no compiler optimizer free lunch with SIMD reductions and you will need to help the compiler a bit in order to get there…
A glimpse into the future: portable_simd
Unfortunately, the influence of Satan on the design of SIMD instruction sets does not end at the hardware level. The hardware vendor-advertised APIs for using SIMD hold the dubious distinction of feeling even worse to use. But thankfully, there is some hope on the Rust horizon.
The GCC and clang compilers have long provided a SIMD hardware abstraction layer, which provides an easy way to access the common set of SIMD operations that all hardware vendors agree is worth having (or at least is efficient enough to emulate on hardware that disagrees). As is too common when compiler authors design user interfaces, the associated C API does not win beauty contests, and is therefore rarely used by C/++ practicioners. However, a small but well-motivated team has been hard at work during the past few years building a nice high-level Rust API on top of this low-level compiler functionality.
This project is currently integrated into nightly versions of the Rust compiler
as the std::simd experimental
standard library module. It is an important project because if it succeeds at
being integrated into stable Rust on a reasonable time frame, it might actually
be the first time a mainstream programming language provides a standardized1
API for writing SIMD code, that works well enough for common use cases without
asking programmers to write one separate code path for each supported hardware
instruction set.
This becomes important when you realize that x86 released more than 352 extensions to its SIMD instruction set in around 40 years of history, while Arm has been maintaining two families of incompatible SIMD instruction set extensions with completely different API logic3 across their platform for a few years now and will probably need to keep doing so for many decades to come. And that’s just the two main CPU vendors as of 2024, not accounting for the wider zoo of obscure embedded CPU architectures that people like the spatial sector need to cope with. Unless you are Intel or Arm and have thousands of people-hours to spend on maintaining dozens of optimized backends for your mathematical libraries, achieving portable SIMD performance through hand-tuned hardware-specific code paths is simply not feasible anymore in the 21st century.
In contrast, using std::simd and the multiversion
crate4, a reasonably
efficient SIMD-enabled floating point number summing function can be written
like this…
#![feature(portable_simd)] // Release the nightly compiler kraken
use multiversion::{multiversion, target::selected_target};
use std::simd::prelude::*;
#[multiversion(targets("x86_64+avx2+fma", "x86_64+avx", "x86_64+sse2"))]
fn simd_sum(x: &Vec<f32>) -> f32 {
// This code uses a few advanced language feature that we do not have time
// to cover during this short course. But feel free to ask the teacher about
// it, or just copy-paste it around.
const SIMD_WIDTH: usize = const {
if let Some(width) = selected_target!().suggested_simd_width::<f32>() {
width
} else {
1
}
};
let (peel, body, tail) = x.as_simd::<SIMD_WIDTH>();
let simd_sum = body.into_iter().sum::<Simd<f32, SIMD_WIDTH>>();
let scalar_sum = peel.into_iter().chain(tail).sum::<f32>();
simd_sum.reduce_sum() + scalar_sum
}…which, as a famous TV show would put it, may not look great, but is definitely not terrible.
Back from the future: slipstream & safe_arch
The idea of using experimental features from a nightly version of the Rust compiler may send shivers down your spine, and that’s understandable. Having your code occasionally fail to build because the language standard library just changed under your feet is really not for everyone.
If you need to target current stable versions of the Rust compilers, the main
alternatives to std::simd that I would advise using are…
slipstream, which tries to do the same thing asstd::simd, but using autovectorization instead of relying on direct compiler SIMD support. It usually generates worse SIMD code thanstd::simd, which says a lot about autovectorization, but for simple things, a slowdown of “only” ~2-3x with respect to peak hardware performance is achievable.safe_arch, which is x86-specific, but provides a very respectable attempt at making the Intel SIMD intrinsics usable by people who were not introduced to programming through the mind-opening afterschool computing seminars of the cult of Yog-Sothoth.
But as you can see, you lose quite a bit by settling for these, which is why
Rust would really benefit from getting std::simd stabilized sooner rather than
later. If you know of a SIMD expert who could help at this task, please consider
attempting to nerd-snipe her into doing so!
Exercise
The practical work environement has already been configured to use a nightly release of the Rust compiler, which is version-pinned for reproducibility.
Integrate simd_sum into the benchmark and compare it to your previous
optimized version. As often with SIMD, you should expect worse performance on
very small inputs, followed by much improved performance on larger inputs, which
will degrade back into less good performance as the input size gets so large
that you start trashing the fastest CPU caches and hitting slower memory tiers.
Notice that the #![feature(portable_simd)] experimental feature enablement
directive must be at the top of the benchmark source file, before any other
program declaration. The other paragraphs of code can be copied anywhere you
like, including after the point where they are used.
If you would fancy a more challenging exercise, try implementing a dot product using the same logic.
Standardization matters here. Library-based SIMD abstraction layers have been around for a long while, but since SIMD hates abstraction and inevitably ends up leaking through APIs sooner rather than later, it is important to have common language vocabulary types so that everyone is speaking the same SIMD language. Also, SIMD libraries have an unfortunate tendency to only correctly cover the latest instruction sets from the most popular hardware vendors, leaving other hardware manufacturers out in the cold and thus encouraging hardware vendor lock-in that this world doesn’t need.
MMX, 3DNow!, SSE, SSE2, SSE3, SSSE3 (not a typo!), SSE4, AVX, F16C, XOP, FMA4 and FMA3, AVX2, the 19 different subsets of AVX-512, AMX, and most recently at the time of writing, AVX10.1 and the upcoming AVX10.2. Not counting more specialized ISA extension that would also arguably belong to this list like BMI and the various cryptography primitives that are commonly (ab)used by the implementation of fast PRNGs.
Which handles the not-so-trivial matter of having your code adapt at runtime to the hardware that you have, without needing to roll out one build per cursed revision of the x86/Arm SIMD instruction set.
ILP
Did you know that a modern CPU core can do multiple things in parallel? And by that, I am not just refering to obvious things like running different threads on different CPU cores, or processing different data elements in a single CPU instruction. Each CPU core from a multicore CPU can literally be executing multiple instructions (possibly SIMD) at the same time, through the advanced hardware magic of superscalar execution.
In what is becoming by now a recurring theme, however, this extra processing power does not come for free. The assembly that your code compiles into must actually feature multiple independent streams of instructions in order to feed all these superscalar execution units. If each instruction from your code depends on the previous one, as was the case in our first SIMD sum implementation, then no superscalar execution will happen, resulting in inefficient CPU hardware use.
In other words, to run optimally fast, your code must feature a form of fine-grained concurrency called Instruction-Level Parallelism, or ILP for short.
The old and cursed way
Back in the days where dinosaurs roamed the Earth and Fortran 77 was a cool new language that made the Cobol-74 folks jealous, the expert-sanctioned way to add N-way instruction-level parallelism to a performance-sensitive computation was to manually unroll the loop and write N copies of your computation code inside of it:
#![allow(unused)] fn main() { fn sum_ilp3(v: &Vec<f32>) -> f32 { let mut accs = [0.0, 0.0, 0.0]; let num_chunks = v.len() / 3; for i in 0..num_chunks { // TODO: Add SIMD here accs[0] += v[3 * i]; accs[1] += v[3 * i + 1]; accs[2] += v[3 * i + 2]; } let first_irregular_idx = 3 * num_chunks; for i in first_irregular_idx..v.len() { accs[i - first_irregular_idx] += v[i]; } accs[0] + accs[1] + accs[2] } let v = vec![1.2, 3.4, 5.6, 7.8, 9.0]; assert_eq!(sum_ilp3(&v), v.into_iter().sum::<f32>()); }
Needless to say, this way of doing things does not scale well to more complex computations or high degrees of instruction-level parallelism. And it can also easily make code a lot harder to maintain, since one must remember to do each modification to the ILP’d code in N different places. Also, I hope for you that you will rarely if ever will need to change the N tuning parameter in order to fit, say, a new CPU architecture with different quantitative parameters.
Thankfully, we are now living in a golden age of computing where high-end fridges have more computational power than the supercomputers of the days where this advice was relevant. Compilers have opted to use some of this abundant computing power to optimize programs better, and programming languages have built on top of these optimizations to provide new features that give library writers a lot more expressive power at little to no runtime performance cost. As a result, we can now have ILP without sacrificing the maintainability of our code like we did above.
The iterator_ilp way
First of all, a mandatory disclaimer: I am the maintainer of the iterator_ilp
library. It started as an experiment to see if the advanced capabilities of
modern Rust could be leveraged to make the cruft of copy-and-paste ILP obsolete.
Since the experiment went well enough for my needs, I am now sharing it with
you, in the hope that you will also find it useful.
The whole raison d’être of iterator_ilp is to take the code that I showed
you above, and make the bold but proven claim that the following code compiles
down to faster1 machine code:
use iterator_ilp::IteratorILP;
fn sum_ilp3(v: &Vec<f32>) -> f32 {
v.into_iter()
// Needed until Rust gets stable generics specialization
.copied()
.sum_ilp::<3, f32>()
}
let v = vec![1.2, 3.4, 5.6, 7.8, 9.0];
assert_eq!(sum_ilp3(&v), v.into_iter().sum::<f32>());Notice how I am able to add new methods to Rust iterators. This leverages a
powerful property of Rust traits, which is that they can be implemented for
third-party types. The requirement for using such an extension trait, as they
are sometimes called, is that the trait that adds new methods must be explicitly
brought in scope using a use statement, as in the code above.
It’s not just that I have manually implemented a special case for floating-point
sums, however. My end goal with this library is that any iterator you can
fold(), I should ultimately be able to fold_ilp() into the moral
equivalent of the ugly hand-unrolled loop that you’ve seen above, with only
minimal code changes required on your side. So for example, this should
ultimately be as efficient as hand-optimized ILP:2
fn norm_sqr_ilp9(v: &Vec<f32>) -> f32 {
v.into_iter()
.copied()
.fold_ilp::<9, _>(
|| 0.0
|acc, elem| elem.mul_add(elem, acc),
|acc1, acc2| acc1 + acc2
)
}Exercise
Use iterator_ilp to add instruction-level parallelism to your SIMD sum, and
benchmark how close doing so gets you to the peak hardware performance of a
single CPU core.
Due to std::simd not being stable yet, it is unfortunately not yet fully
integrated in the broader Rust numerics ecosystem, so you will not be able to
use sum_ilp() and will need the following more verbose fold_ilp()
alternative:
use iterator_ilp::IteratorILP;
let result =
array_of_simd
.iter()
.copied()
.fold_ilp::<2, _>(
// Initialize accumulation with a SIMD vector of zeroes
|| Simd::splat(0.0),
// Accumulate one SIMD vector into the accumulator
|acc, elem| ...,
// Merge two SIMD accumulators at the end
|acc1, acc2| ...,
);Once the code works, you will have to tune the degree of instruction-level parallelism carefully:
- Too little and you will not be able to leverage all of the CPU’s superscalar hardware.
- Too much and you will pass the limit of the CPU’s register file, which will
lead to CPU registers spilling to the stack at a great performance cost.
- Also, beyond a certain degree of specified ILP, the compiler optimizer will often just give up and generate a scalar inner loop, as it does not manage to prove that if it tried harder to optimize, it might eventually get to simpler and faster code.
For what it’s worth, compiler autovectorizers have gotten good enough that you
can actually get the compiler to generate both SIMD instructions and ILP using
nothing but iterator_ilp with huge instruction-level parallelism. However,
reductions do not autovectorize that well for various reasons, so the
performance will be worse. Feel free to benchmark how much you lose by using
this strategy!
It’s mainly faster due to the runtime costs of manual indexing in Rust. I could rewrite the above code with only iterators to eliminate this particular overhead, but hopefully you will agree with me that it would make the code even cruftier than it already is.
Sadly, we’re not there yet today. You saw the iterator-of-reference issue
above, and there are also still some issues around iterators of tuples
from zip(). But I know how to resolve these issues on the implementation
side, and once Rust gets generics specialization, I should be able to
automatically resolve them for you without asking you to call the API
differently.
Parallelism
So far, we have been focusing on using a single CPU core efficiently, honoring some ancient words of software performance optimization wisdom:
You can have have a second computer, once you know how to use the first one.
But as of this chapter, we have finally reached the point where our floating point sum makes good use of the single CPU core that it is running on. Therefore, it’s now time to put all those other CPU cores that have been sitting idle so far to good use.
Easy parallelism with rayon
The Rust standard library only provides low-level parallelism primitives like
threads and mutexes. However, limiting yourself to these would be unwise, as the
third-party Rust library ecosystem is full of multithreading gems. One of them
is the rayon crate, which provides equivalents of standard Rust iterators that
automatically distribute your computation over multiple threads of execution.
Getting started with rayon is very easy. First you add it as a dependency to
your project…
cargo add rayon
…and then you pick the computation you want to parallelize, and replace standard Rust iteration with the rayon-provided parallel iteration methods:
use rayon::prelude::*;
fn par_sum(v: &Vec<f32>) -> f32 {
v.into_par_iter().sum()
}That’s it, your computation is now running in parallel. By default, it will use
one thread per available CPU hyperthread. You can easily tune this using the
RAYON_NUM_THREADS environment variable. And for more advanced use cases like
comparative benchmarking at various numbers of threads, it is also possible to
configure the thread pool from your
code.
The power of ownership
Other programming languages also provide easy-looking ways to easily parallelize computations, like OpenMP in C/++ and Fortran. But it you have tried them, your experience was probably not great. It is likely that you have run into all kinds of wrong results, segfaults, and other nastiness.
This happens much more rarely in Rust, because Rust’s ownership and borrowing model has been designed from the start to make multi-threading easier. As a reminder, in Rust, you can only have one code path writing to a variable at a same time, or N code paths reading from it. So by construction, data races, where multiple threads attempt to access data and at least one is writing, cannot happen in safe Rust. This is great because data races are one of the worst kinds of parallelism bug. They result in undefined behavior, and therefore give the compiler and hardware license to trash your program in unpredictable ways, which they will gladly do.
That being said, it is easy to misunderstand the guarantees that Rust gives you and get a false sense of security from this, which will come back to bite you later on. So let’s make things straight right now: Rust does not protect against all parallelism bugs. Deadlocks, and race conditions other than data races where operations are performed in the “wrong” order, can still happen. It is sadly not the case that just because you are using Rust, you can forget about decades of research in multi-threaded application architecture and safe multi-threading patterns. Getting there will hopefully be the job of the next generation of programming language research.
What Rust does give you, however, is a language-enforced protection against the worst kinds of multi-threading bugs, and a vibrant ecosystem of libraries that make it trivial for you to apply solid multi-threading architectural patterns in your application in order to protect yourself from the other bugs. And all this power is available for you today, not hopefully tomorrow if the research goes well.
Optimizing the Rayon configuration
Now, if you have benchmarked the above parallel computation, you may have been disappointed with the runtime performance, especially at low problem size. One drawback of libraries like Rayon that implement a very general parallelism model is that they can only be performance-tuned for a specific kind of code, which is not necessarily the kind of code that you are writing right now. So for specific computations, fine-tuning may be needed to get optimal results.
In our case, one problem that we have is that Rayon automatically slices our workload into arbitrarily small chunks, down to a single floating-point number, in order to keep all of its CPU threads busy. This is appropriate when each computation from the input iterator is relatively complex, like processing a full data file, but not for simple computations like floating point sums. At this scale, the overhead of distributing work and waiting for it to complete gets much higher than the performance gain brought by parallelizing.
We can avoid this issue by giving Rayon a minimal granularity below
which work should be processed sequentially, using the par_chunks method:
use rayon::prelude::*;
fn par_sum(v: &Vec<f32>) -> f32 {
// TODO: This parameter must be tuned empirically for your particular
// computation, on your target hardware.
v.par_chunks(1024)
.map(seq_sum)
.sum()
}
// This function will operate sequentially on slices whose length is dictated by
// the tuning parameter given to par_chunks() above.
fn seq_sum(s: &[f32]) -> f32 {
// TODO: Replace with optimized sequential sum with SIMD and ILP.
s.into_iter().sum()
}Notice that par_chunks method produces a parallel iterator of slices, not
Vecs. Slices are simpler objects than Vecs, so every Vec can be
reinterpreted as a slice, but not every slice can be reinterpreted as a Vec.
This is why the idiomatic style for writing numerical code in Rust is actually
to accept slices as input, not &Vec. I have only written code that takes
&Vec in previous examples to make your learning process easier.
With this change, we can reach the crossover point where the parallel computation is faster than the sequential one at a smaller input size. But spawning and joining a parallel job itself has fixed costs, and that cost doesn’t go down when you increase the sequential granularity. So a computation that is efficient all input sizes would be closer to this:
fn sum(v: &Vec<f32>) -> f32 {
// TODO: Again, this will require workload- and hardware-specific tuning
if v.len() > 4096 {
par_sum(v)
} else {
seq_sum(v.as_slice())
}
}Of course, whether you need these optimizations depends on how much you are
interested at performance at small input sizes. If the datasets that you are
processing are always huge, the default rayon parallelization logic should
provide you with near-optimal performance without extra tuning. Which is
likely why rayon does not perform these optimizations for you by default.
Exercise
Parallelize one of the computations that you have optimized previously using
rayon. You will not need to run cargo add rayon in the exercises project,
because for HPC network policy reasons, the dependency needed to be added and
downloaded for you ahead of time.
Try benchmarking the computation at various number of threads, and see how it
affects performance. As a reminder, you can tune the number of threads using the
RAYON_NUM_THREADS environment variable. The hardware limit above which you can
expect no benefit from extra threads is the number of system CPUs, which can be
queried using nproc. But as you will see, sometimes less threads can be
better.
If you choose to implement the par_chunks() and fully sequential fallback
optimizations, do not forget to adjust the associated tuning parameters for
optimal performance at all input sizes.
ndarray
At this point, you should know enough about numerical computing in Rust to efficiently implement any classic one-dimensional computation, from FFT to BLAS level 1 vector operations.
Sadly, this is not enough, because the real world insists on solving multi-dimensional mathematical problems1. And therefore you will need to learn what it takes to make these efficient in Rust too.
The first step to get there is to have a way to actually get multi-dimensional arrays into your code. Which will be the topic of this chapter.
Motivation
Multi-dimensional array libraries are actually not a strict requirement for numerical computing. If programming like a BASIC programmer from the 80s is your kink, you can just treat any 1D array as a multidimensional array by using the venerable index linearization trick:
#![allow(unused)] fn main() { let array = [00, 01, 02, 03, 04, 10, 11, 12, 13, 14, 20, 21, 22, 23, 24, 30, 31, 32, 33, 34]; let row_length = 5; let index_2d = [2, 1]; let index_linear = row_length * index_2d[0] + index_2d[1]; assert_eq!(array[index_linear], 21); }
There are only two major problems with this way of doing things:
- Writing non-toy code using this technique is highly error-prone. You will spend many hours debugging why a wrong result is returned, only to find out much later that you have swapped the row and column index, or did not keep the row length metadata in sync with changes to the contents of the underlying array.
- It is nearly impossible to access manually implemented multidimensional arrays
without relying on lots of manual array/
Vecindexing. The correctness and runtime performance issues of these indexing operations should be quite familiar to you by now, so if we can, it would be great to get rid of them in our code.
The ndarray crate resolves these problems by implementing all the tricky index
linearization code for you, and exposing it using types that act like a
multidimensional version of Rust’s Vecs and slices. These types keep data and
shape metadata in sync for you, and come with multidimensional versions of all
the utility methods that you are used to coming from standard library Vec and
slices, including multidimensional overlapping window iterators.
ndarray is definitely not the only library doing this in the Rust ecosystem,
but it is one of the most popular ones. This means that you will find plenty of
other libraries that build on top of it, like linear algebra and statistics
libraries. Also, of all available options, it is in my opinion currently the one
that provides the best tradeoff between ease of use, runtime performance,
generality and expressive power. This makes it an excellent choice for
computations that go a little bit outside of the linear algebra textbook
vocabulary, including our Gray-Scott reaction simulation.
Adding ndarray to your project
As usual, adding a new dependency is as easy as cargo add:
cargo add ndarray
But this time, you may want to look into the list of optional features that gets displayed in your console when you run this command:
$ cargo add ndarray
Updating crates.io index
Adding ndarray v0.15.6 to dependencies
Features:
+ std
- approx
- approx-0_5
- blas
- cblas-sys
- docs
- libc
- matrixmultiply-threading
- rayon
- rayon_
- serde
- serde-1
- test
By default, ndarray keeps the set of enabled features small for optimal
compilation speed and output binary size. But if you want to do more advanced
numerics with ndarray in the future, some of the optional functionality like
integration with the system BLAS or parallel Rayon iterators over the contents
of multidimensional arrays may come very handy. We will, however, not need them
for this particular course, so let’s move on.
Creating Arrays
The heart of ndarray is
ArrayBase, a
very generic multidimensional array type that can either own its data (like
Vec) or borrow it from a Rust slice that you obtained from some other source.
While you are learning Rust, you will likely find it easier to avoid using this
very general-purpose generic type directly, and instead work with the various
type aliases that are provided by the ndarray crate for easier operation. For
our purposes, three especially useful aliases will be…
Array2, which represents an owned two-dimensional array of data (similar toVec<T>)ArrayView2, which represents a shared 2D slice of data (similar to&[T])ArrayViewMut2, which represents a mutable 2D slice of data (similar to&mut [T])
But because these are just type aliases, the documentation page for them will
not tell you about all available methods. So you will still want to keep the
ArrayBase documentation
close by.
Another useful tool in ndarray is the array! macro, which lets you create
Arrays using a syntax analogous to that of the vec![] macro:
use ndarray::array;
let a2 = array![[01, 02, 03],
[11, 12, 13]];You can also create Arrays from a function that maps each index to a
corresponding data element…
use ndarray::{Array, arr2};
// Create a table of i × j (with i and j from 1 to 3)
let ij_table = Array::from_shape_fn((3, 3), |(i, j)| (1 + i) * (1 + j));
assert_eq!(
ij_table,
// You can also create an array from a slice of Rust arrays
arr2(&[[1, 2, 3],
[2, 4, 6],
[3, 6, 9]])
);…and if you have a Vec of data around, you can turn it into an Array as
well.
But because a Vec does not come with multidimensional shape information, you
will need to provide this information separately, at the risk of it going out of
sync with the source data. And you will also need to pay close attention to the
the order in which Array elements should be provided by the input Vec
(ndarray uses row-major order by default).
So all in all, in order to avoid bugs, it is best to avoid these last conversions and stick with the ndarray APIs whenever you can.
Iteration
Rust iterators were designed for one-dimensional data, and using them for multidimensional data comes at the cost of losing useful information. For example, they cannot express concepts like “here is a block of data that is contiguous in memory, but then there is a gap” or “I would like the iterator to skip to the next row of my matrix here, and then resume iteration”.
For this reason, ndarray does not directly use standard Rust iterators.
Instead, it uses a homegrown abstraction called
NdProducer,
which can be lossily converted to a standard iterator.
We will not be leveraging the specifics of ndarray producers much in this
course, as standard iterators are enough for what we are doing. But I am telling
you about this because it explains why iterating over Arrays may involve a
different API than iterating over a standard Rust collection, or require an
extra into_iter() producer-to-iterator conversion step.
In simple cases, however, the conversion will just be done automatically. For
example, here is how one would iterate over 3x3 overlapping windows of an
Array2 using ndarray:
use ndarray::{array, azip};
let arr = array![[01, 02, 03, 04, 05, 06, 07, 08, 09],
[11, 12, 13, 14, 15, 16, 17, 18, 19],
[21, 22, 23, 24, 25, 26, 27, 28, 29],
[31, 32, 33, 34, 35, 36, 37, 38, 39],
[41, 42, 43, 44, 45, 46, 47, 48, 49]];
for win in arr.windows([3, 3]) {
println!("{win:?}");
}ndarray comes with a large set of producers, some of which are more
specialized and optimized than others. It is therefore a good idea to spend some
time looking through the various options that can be used to solve a particular
problem, rather than picking the first producer that works.
Indexing and slicing
Like Vecs and slices, Arrays and ArrayViews support indexing and slicing.
And as with Vecs and slices, it is generally a good idea to avoid using these
operations for performance and correctness reasons, especially inside of
performance-critical loops.
Indexing works using squared brackets as usual, the only new thing being that you can pass in an array or a tuple of indices instead of just one index:
use ndarray::Array2;
let mut array = Array2::zeros((4, 3));
array[[1, 1]] = 7;However, a design oversight in the Rust indexing operator means that it cannot be used for slicing multidimensional arrays. Instead, you will need the following somewhat unclean syntax:
use ndarray::s;
let b = a.slice(s![.., 0..1, ..]);Notice the use of an s![] macro for constructing a slicing configuration
object, which is then passed to a slice() method of the generic ArrayView
object.
This is just one of many slicing methods. Among others, we also get…
slice(), which createsArrayViews (analogous to&vec[start..finish])slice_mut(), which createsArrayViewMuts (analogous to&mut vec[start..finish])multi_slice_mut(), which creates several non-overlappingArrayViewMuts in a single transaction. This can be used to work around Rust’s “single mutable borrow” rule when it proves to be an unnecessary annoyance.slice_move(), which consumes the input array or view and returns an owned slice.
Exercise
All ndarray types natively support a sum() operation. Compare its
performance to that or your optimized floating-point sum implementation over a
wide range of input sizes.
One thing which will make your life easier is that
Array1, the owned
one-dimensional array type, can be built from a standard iterator using the
Array::from_iter()
constructor.
…which are a poor fit for the one-dimensional memory architecture of standard computers, and this will cause a nearly infinite amount of fun problems that we will not get the chance to all cover during this school.
Gray-Scott introduction
We are now ready to introduce the final boss computation of this course: the
Gray-Scott reaction simulation. In this chapter, you will be taken through a
rapid tour of the pre-made setup that is provided to you for the purpose of
input initialization, kernel benchmarking, and output HDF5 production. We will
then conclude this tour by showing how one would implement a simple, unoptimized
version of the simulation using ndarray.
Along the way, you will also get a quick glimpse of how Rust’s structs and methods work. We did not get to explore this area of the language to fit the course’s 1-day format, but in a nutshell they can be used to implement encapsulated objects like C++ classes, and that’s what we do here.
Input initialization
The reference C++ implementation of the Gray-Scott simulation hardcodes the initial input state of the simulation, For the sake of keeping things simple and comparable, we will do the same:
use ndarray::Array2;
/// Computation precision
///
/// It is a good idea to make this easy to change in your programs, especially
/// if you care about hardware portability or have ill-specified output
/// precision requirements.
///
/// Notice the "pub" keyword for exposing this to the outside world. All types,
/// functions... are private to the current code module by default in Rust.
pub type Float = f32;
/// Storage for the concentrations of the U and V chemical species
pub struct UV {
pub u: Array2<Float>,
pub v: Array2<Float>,
}
//
/// impl blocks like this let us add methods to types in Rust
impl UV {
/// Set up the hardcoded chemical species concentration
///
/// Notice the `Self` syntax which allows you to refer to the type for which
/// the method is implemented.
fn new(num_rows: usize, num_cols: usize) -> Self {
let shape = [num_rows, num_cols];
let pattern = |row, col| {
(row >= (7 * num_rows / 16).saturating_sub(4)
&& row < (8 * num_rows / 16).saturating_sub(4)
&& col >= 7 * num_cols / 16
&& col < 8 * num_cols / 16) as u8 as Float
};
let u = Array2::from_shape_fn(shape, |(row, col)| 1.0 - pattern(row, col));
let v = Array2::from_shape_fn(shape, |(row, col)| pattern(row, col));
Self { u, v }
}
/// Set up an all-zeroes chemical species concentration
///
/// This can be faster than `new()`, especially on operating systems like
/// Linux where all allocated memory is guaranteed to be initially zeroed
/// out for security reasons.
fn zeroes(num_rows: usize, num_cols: usize) -> Self {
let shape = [num_rows, num_cols];
let u = Array2::zeros(shape);
let v = Array2::zeros(shape);
Self { u, v }
}
/// Get the number of rows and columns of the simulation domain
///
/// Notice the `&self` syntax for borrowing the object on which the method
/// is being called by shared reference.
pub fn shape(&self) -> [usize; 2] {
let shape = self.u.shape();
[shape[0], shape[1]]
}
}Double buffering
The Gray-Scott reaction is simulated by updating the concentrations of the U and V chemical species many times. This is done by reading the old concentrations of the chemical species from one array, and writing the new concentrations to another array.
We could be creating a new array of concentrations every time we do this, but this would require performing one memory allocation per simulation step, which can be expensive. Instead, it is more efficient to use the double buffering pattern. In this pattern, we keep two versions of the concentration in an array, and on every step of the simulation, we read from one of the array slots and write to the other array slot. Then we flip the role of the array slots for the next simulation step.
We can translate this pattern into a simple encapsulated object…
/// Double-buffered chemical species concentration storage
pub struct Concentrations {
buffers: [UV; 2],
src_is_1: bool,
}
//
impl Concentrations {
/// Set up the simulation state
pub fn new(num_rows: usize, num_cols: usize) -> Self {
Self {
buffers: [UV::new(num_rows, num_cols), UV::zeroes(num_rows, num_cols)],
src_is_1: false,
}
}
/// Get the number of rows and columns of the simulation domain
pub fn shape(&self) -> [usize; 2] {
self.buffers[0].shape()
}
/// Read out the current species concentrations
pub fn current(&self) -> &UV {
&self.buffers[self.src_is_1 as usize]
}
/// Run a simulation step
///
/// The user callback function `step` will be called with two inputs UVs:
/// one containing the initial species concentration at the start of the
/// simulation step, and one to receive the final species concentration that
/// the simulation step is in charge of generating.
///
/// Notice the `&mut self` syntax for borrowing the object on which
/// the method is being called by mutable reference.
pub fn update(&mut self, step: impl FnOnce(&UV, &mut UV)) {
let [ref mut uv_0, ref mut uv_1] = &mut self.buffers;
if self.src_is_1 {
step(uv_1, uv_0);
} else {
step(uv_0, uv_1);
}
self.src_is_1 = !self.src_is_1;
}
}…and then this object can be used to run the simulation like this:
// Set up the concentrations buffer
let mut concentrations = Concentrations::new(num_rows, num_cols);
// ... other initialization work ...
// Main simulation loop
let mut running = true;
while running {
// Update the concentrations of the U and V chemical species
concentrations.update(|start, end| {
// TODO: Derive new "end" concentration from "start" concentration
end.u.assign(&start.u);
end.v.assign(&start.v);
});
// ... other per-step action, e.g. decide whether to keep running,
// write the concentrations to disk from time to time ...
running = false;
}
// Get the final concentrations at the end of the simulation
let result = concentrations.current();
println!("u is {:#?}", result.u);
println!("v is {:#?}", result.v);HDF5 output
The reference C++ simulation lets you write down the concentration of the V chemical species to an HDF5 file every N computation steps. This can be used to check that the simulation works properly, or to turn the evolving concentration “pictures” into a video for visualization purposes.
Following its example, we will use the hdf5 Rust crate
to write data to HDF5 too, using the same file layout conventions for
interoperability. Here too, we will use an encapsulated object design to keep
things easy to use correctly:
/// Mechanism to write down results to an HDF5 file
pub struct HDF5Writer {
/// HDF5 file handle
file: File,
/// HDF5 dataset
dataset: Dataset,
/// Number of images that were written so far
position: usize,
}
impl HDF5Writer {
/// Create or truncate the file
///
/// The file will be dimensioned to store a certain amount of V species
/// concentration arrays.
///
/// The `Result` return type indicates that this method can fail and the
/// associated I/O errors must be handled somehow.
pub fn create(file_name: &str, shape: [usize; 2], num_images: usize) -> hdf5::Result<Self> {
// The ? syntax lets us propagate errors from an inner function call to
// the caller, when we cannot handle them ourselves.
let file = File::create(file_name)?;
let [rows, cols] = shape;
let dataset = file
.new_dataset::<Float>()
.chunk([1, rows, cols])
.shape([num_images, rows, cols])
.create("matrix")?;
Ok(Self {
file,
dataset,
position: 0,
})
}
/// Write a new V species concentration table to the file
pub fn write(&mut self, result: &UV) -> hdf5::Result<()> {
self.dataset
.write_slice(&result.v, (self.position, .., ..))?;
self.position += 1;
Ok(())
}
/// Flush remaining data to the underlying storage medium and close the file
///
/// This should automatically happen on Drop, but doing it manually allows
/// you to catch and handle I/O errors properly.
pub fn close(self) -> hdf5::Result<()> {
self.file.close()
}
}
After adding this feature, our simulation code skeleton now looks like this:
// Set up the concentrations buffer
let mut concentrations = Concentrations::new(num_rows, num_cols);
// Set up HDF5 I/O
let mut hdf5 = HDF5Writer::create(file_name, concentrations.shape(), num_output_steps)?;
// Produce the requested amount of concentration tables
for _ in 0..num_output_steps {
// Run a number of simulation steps
for _ in 0..compute_steps_per_output_step {
// Update the concentrations of the U and V chemical species
concentrations.update(|start, end| {
// TODO: Derive new "end" concentration from "start" concentration
end.u.assign(&start.u);
end.v.assign(&start.v);
});
}
// Write down the current simulation output
hdf5.write(concentrations.current())?;
}
// Close the HDF5 file
hdf5.close()?;Reusable simulation skeleton
Right now, our simulation’s update function is a stub that simply copies the input concentrations to the output concentrations without actually changing them. At some point, we are going to need to compute the real updated chemical species concentrations there.
However, we also know from our growing experience with software performance optimization that we are going to need tweak this part of the code a lot. It would be great if we could do this in a laser-focused function that is decoupled from the rest of the code, so that we can easily do things like swapping computation backends and seeing what it changes. As it turns out, a judiciously placed callback interface lets us do just this:
/// Simulation runner options
pub struct RunnerOptions {
/// Number of rows in the concentration table
num_rows: usize,
/// Number of columns in the concentration table
num_cols: usize,
/// Output file name
file_name: String,
/// Number of simulation steps to write to the output file
num_output_steps: usize,
/// Number of computation steps to run between each write
compute_steps_per_output_step: usize,
}
/// Simulation runner, with a user-specified concentration update function
pub fn run_simulation(
opts: &RunnerOptions,
// Notice that we must use FnMut here because the update function can be
// called multiple times, which FnOnce does not allow.
mut update: impl FnMut(&UV, &mut UV),
) -> hdf5::Result<()> {
// Set up the concentrations buffer
let mut concentrations = Concentrations::new(opts.num_rows, opts.num_cols);
// Set up HDF5 I/O
let mut hdf5 = HDF5Writer::create(
&opts.file_name,
concentrations.shape(),
opts.num_output_steps,
)?;
// Produce the requested amount of concentration tables
for _ in 0..opts.num_output_steps {
// Run a number of simulation steps
for _ in 0..opts.compute_steps_per_output_step {
// Update the concentrations of the U and V chemical species
concentrations.update(&mut update);
}
// Write down the current simulation output
hdf5.write(concentrations.current())?;
}
// Close the HDF5 file
hdf5.close()
}Command-line options
Our simulation has a fair of tuning parameters. To those that we have already
listed in RunnerOptions, the computational chemistry of the Gray-Scott
reaction requires that we add the following tunable parameters:
- The speed at which V turns into P
- The speed at which U is added to the simulation and U, V and P are removed
- The amount of simulated time that passes between simulation steps
We could just hardcode all these parameters, but doing so would anger the gods of software engineering and break feature parity with the reference C++ version. So instead we will make these parameters configurable via command-line parameters whose syntax and semantics strictly match those of the C++ version.
To this end, we can use the excellent clap library,
which provides the best API for parsing command line options that I have ever
seen in any programming language.
The first step, as usual, is to clap as a dependency to our project. We will
also enable the derive optional feature, which is the key to the
aforementioned nice API:
cargo add --features=derive clap
We will then add some annotations to the definition of our options structs, explaining how they map to the command-line options that our program expects (which follow the syntax and defaults of the C++ reference version for interoperability):
use clap::Args;
/// Simulation runner options
#[derive(Debug, Args)]
pub struct RunnerOptions {
/// Number of rows in the concentration table
#[arg(short = 'r', long = "nbrow", default_value_t = 1080)]
pub num_rows: usize,
/// Number of columns in the concentration table
#[arg(short = 'c', long = "nbcol", default_value_t = 1920)]
pub num_cols: usize,
/// Output file name
#[arg(short = 'o', long = "output", default_value = "output.h5")]
pub file_name: String,
/// Number of simulation steps to write to the output file
#[arg(short = 'n', long = "nbimage", default_value_t = 1000)]
pub num_output_steps: usize,
/// Number of computation steps to run between each write
#[arg(short = 'e', long = "nbextrastep", default_value_t = 34)]
pub compute_steps_per_output_step: usize,
}
/// Simulation update options
#[derive(Debug, Args)]
pub struct UpdateOptions {
/// Speed at which U is added to the simulation and U, V and P are removed
#[arg(short, long, default_value_t = 0.014)]
pub feedrate: Float,
/// Speed at which V turns into P
#[arg(short, long, default_value_t = 0.054)]
pub killrate: Float,
/// Simulated time interval on each simulation step
#[arg(short = 't', long, default_value_t = 1.0)]
pub deltat: Float,
}We then create a top-level struct which represents our full command-line interface…
use clap::Parser;
/// Gray-Scott reaction simulation
///
/// This program simulates the Gray-Scott reaction through a finite difference
/// schema that gets integrated via the Euler method.
#[derive(Debug, Parser)]
#[command(version)]
pub struct Options {
#[command(flatten)]
runner: RunnerOptions,
#[command(flatten)]
pub update: UpdateOptions,
}…and in the main function of our final application, we call the automatically
generated parse() method of that struct and retrieve the parsed command-line
options.
fn main() {
let options = Options::parse();
// ... now do something with "options" ...
}That’s it. With no extra work, clap will automatically provide our
simulation with a command-line interface that follows all standard Unix
conventions (e.g. supports both --option value and --option=value), handles
user errors, parses argument strings to their respective concrete Rust types,
and prints auto-generated help strings when -h or --help is passed.
Also, if you spend 10 more minutes on it, you can make as many of these options
as you want configurable via environment variables too. Which can be convenient
in scenarios where you cannot receive configuration through CLI parameters, like
inside of criterion microbenchmarks.
Hardcoded parameters
Not all parameters of the C++ reference version are configurable. Some of them are hardcoded, and can only be changed by altering the source code. Since we are aiming for perfect user interface parity with the C++ version, we want to replicate this design in the Rust version.
For now, we will do this by adding a few constants with the hardcoded values to the source code:
#![allow(unused)] fn main() { type Float = f32; /// Weights of the discrete convolution stencil pub const STENCIL_WEIGHTS: [[Float; 3]; 3] = [ [0.25, 0.5, 0.25], [0.5, 0.0, 0.5], [0.25, 0.5, 0.25] ]; /// Offset from the top-left corner of STENCIL_WEIGHTS to its center pub const STENCIL_OFFSET: [usize; 2] = [1, 1]; /// Diffusion rate of the U species pub const DIFFUSION_RATE_U: Float = 0.1; /// Diffusion rate of the V species pub const DIFFUSION_RATE_V: Float = 0.05; }
In Rust, const items let you declare compile-time constants, much like
constexpr variables in C++, parameters in Fortran, and #define STUFF 123
in C. We do not have the time to dive into the associated language
infrastructure, but for now, all you need to know is that the value of a const
will be copy-pasted on each point of use, which ensures that the compiler
optimizer can specialize the code for the value of the parameter of interest.
Progress reporting
Simulations can take a long time to run. It is not nice to make users wait for
them to run to completion without any CLI output indicating how far along they
are and how much time remains until they are done. Especially when it is very
easy to add such reporting in Rust, thanks to the wonderful
indicatif library.
To use it, we start by adding the library to our project’s dependencies…
cargo add indicatif
Then in our main function, we create a progress bar with a number of steps matching the number of computation steps…
use indicatif::ProgressBar;
let progress = ProgressBar::new(
(options.runner.num_output_steps
* options.runner.compute_steps_per_output_step) as u64,
);…we increment it on each computation step…
progress.inc(1);…and at the end of the simulation, we tell indicatif that we are done1:
progress.finish();That’s all we need to add basic progress reporting to our simulation.
Final code layout
This is not a huge amount of code overall, but it does get uncomfortably large
and unfocused for a single code module. So in the exercises Rust project, the
simulation code has been split over multiple code modules.
We do not have the time to cover the Rust module system in this course, but if you are interested, feel free to skim through the code to get a rough idea of how modularization is done, and ask any question that comes to your mind while doing so.
Microbenchmarks can only access code from the main library (below the src
directory of the project, excluding the bin/ subdirectory), therefore most of
the code lies there. In addition, we have added a simulation binary under
src/bin/simulate.rs, and a microbenchmark under benches/simulate.rs.
Exercise
Here is a naïve implementation of a Gray-Scott simulation step implemented using
ndarray:
use crate::options::{DIFFUSION_RATE_U, DIFFUSION_RATE_V, STENCIL_OFFSET, STENCIL_WEIGHTS};
/// Simulation update function
pub fn update(opts: &UpdateOptions, start: &UV, end: &mut UV) {
// Species concentration matrix shape
let shape = start.shape();
// Iterate over pixels of the species concentration matrices
ndarray::azip!(
(
index (out_row, out_col),
out_u in &mut end.u,
out_v in &mut end.v,
&u in &start.u,
&v in &start.v
) {
// Determine the stencil's input region
let out_pos = [out_row, out_col];
let stencil_start = array2(|i| out_pos[i].saturating_sub(STENCIL_OFFSET[i]));
let stencil_end = array2(|i| (out_pos[i] + STENCIL_OFFSET[i] + 1).min(shape[i]));
let stencil_range = array2(|i| stencil_start[i]..stencil_end[i]);
let stencil_slice = ndarray::s![stencil_range[0].clone(), stencil_range[1].clone()];
// Compute the diffusion gradient for U and V
let [full_u, full_v] = (start.u.slice(stencil_slice).indexed_iter())
.zip(start.v.slice(stencil_slice))
.fold(
[0.; 2],
|[acc_u, acc_v], (((in_row, in_col), &stencil_u), &stencil_v)| {
let weight = STENCIL_WEIGHTS[in_row][in_col];
[acc_u + weight * (stencil_u - u), acc_v + weight * (stencil_v - v)]
},
);
// Deduce the change in U and V concentration
let uv_square = u * v * v;
let du = DIFFUSION_RATE_U * full_u - uv_square + opts.feedrate * (1.0 - u);
let dv = DIFFUSION_RATE_V * full_v + uv_square
- (opts.feedrate + opts.killrate) * v;
*out_u = u + du * opts.deltat;
*out_v = v + dv * opts.deltat;
}
);
}
/// Shorthand for creating a 2D Rust array from an index -> value mapping
fn array2<T>(f: impl FnMut(usize) -> T) -> [T; 2] {
std::array::from_fn(f)
}Please integrate it into the codebase such that it can is used by both the
simulation binary at src/bin/simulate.rs and the microbenchmark at
benches/simulate.rs. Then make sure everything works by running both of them
using the following commands:
# Must use -- to separate cargo options from program options
cargo run --release --bin simulate -- -n 5 -e 2
cargo bench --bench simulate
It is expected that the last command will take a few minutes to complete. We are just at the start of our journey, and there’s a lot of optimization work to do. But the set of benchmark configurations is designed to remain relevant by the time where the simulation will be running much, much faster.
Also, starting at this chapter, the exercises are going to get significantly more complex. Therefore, it is a good idea to keep track of old versions of your work and have a way to get back to old versions. To do this, you can turn the exercises codebase into a git repository…
cd ~/exercises
git init
git add --all
git commit -m "Initial commit"
…then save a commit at the end of each chapter, or more generally whenever you feel like you have a codebase state that’s worth keeping around for later.
git add --all
git commit -m "<Describe your code changes here>"
This step is needed because indicatif allows you to add more work to the
progress bar.
Regularizing
If you ran a profiler on the initial code that you were provided with, you would find that it spends an unacceptable amount of time computing which indices of the concentration tables should be targeted by the input stencil, and slicing the input tables at these locations.
In other words, this part of the code is the bottleneck:
// Determine the stencil's input region
let out_pos = [out_row, out_col];
let stencil_start = array2(|i| out_pos[i].saturating_sub(STENCIL_OFFSET[i]));
let stencil_end = array2(|i| (out_pos[i] + STENCIL_OFFSET[i] + 1).min(shape[i]));
let stencil_range = array2(|i| stencil_start[i]..stencil_end[i]);
let stencil_slice = ndarray::s![stencil_range[0].clone(), stencil_range[1].clone()];
// Compute the diffusion gradient for U and V
let [full_u, full_v] = (start.u.slice(stencil_slice).indexed_iter())
.zip(start.v.slice(stencil_slice))
.fold(/* ... proceed with the computation ... */)We have seen, however, that ndarray provides us with an optimized sliding
window iterator called windows(). One obvious next steps would be to use this
iterator instead of doing all the indexing ourselves. This is not as easy as it
seems, but getting there will be the purpose of this chapter.
The boundary condition problem
Our Gray-Scott reaction simulation is a member of a larger family or numerical computations called stencil computations. What these computations all have in common is that their output at one particular spatial location depends on a weighted average of the neighbours of this spatial location in the input table. And therefore, all stencil computations must address one common concern: what should be done when there is no neighbour, on the edges or corners of the simulation domain?
In this course, we use a zero boundary condition. That is to say, we extend the simulation domain by saying that if we need to read a chemical species’ concentration outside of the simulation domain, the read will always return zero. And the way we implement this policy in code is that we do not do the computation at all for these stencil elements. This works because multiplying one of the stencil weights by zero will return zero, and therefore the associated contribution to the final weighted sum will be zero, as if the associated stencil elements were not taken into account to begin with.
Handling missing values like this is a common choice, and there is nothing wrong
with it per se. However, it means that we cannot simply switch to ndarray’s
windows iterator by changing our simulation update loop into something like this:
ndarray::azip!(
(
out_u in &mut end.u,
out_v in &mut end.v,
win_u in start.u.windows([3, 3]),
win_v in start.v.windows([3, 3]),
) {
// TODO: Adjust the rest of the computation to work with these inputs
}
);The reason why it does not work is that for a 2D array of dimensions NxM, iterating over output elements will produce all NxM elements, whereas iterating over 3x3 windows will only produce (N-2)x(M-2) valid input windows. Therefore, the above computation loop is meaningless and if you try to work with it anyway, you will inevitably produce incorrect results.
There are two classic ways to resolve this issue:
- We can make our data layout more complicated by resizing the concentration tables to add a strip of zeroes all around the actually useful data, and be careful never to touch these zeroes so that they keep being zeros.
- We can make our update loop more complcated by splitting it into two parts, one which processes the center of the simulation domain with optimal efficiency, and one which processes the edge at a reduced efficiency.
Both approaches have their merits, and at nontrivial problem size they have equivalent performance. The first approach makes the update loop simpler, but the second approach avoids polluting the rest of the codebase1 with edge element handling concerns. Knowing this, it is up to you to choose where you should spend your code complexity budget.
Optimizing the central iterations
The azip loop above was actually almost right for computing the central
concentration values. It only takes a little bit of extra slicing to make it
correct:
let shape = start.shape();
let center = ndarray::s![1..shape[0]-1, 1..shape[1]-1];
ndarray::azip!(
(
out_u in end.u.slice_mut(center),
out_v in end.v.slice_mut(center),
win_u in start.u.windows([3, 3]),
win_v in start.v.windows([3, 3]),
) {
// TODO: Adjust the rest of the computation to work with these inputs
}
);With this change, we now know that the computation will always work on 3x3 input windows, and therefore we can dramatically simplify the per-iteration code:
let shape = start.shape();
let center = s![1..shape[0]-1, 1..shape[1]-1];
ndarray::azip!(
(
out_u in end.u.slice_mut(center),
out_v in end.v.slice_mut(center),
win_u in start.u.windows([3, 3]),
win_v in start.v.windows([3, 3]),
) {
// Get the center concentration
let u = win_u[STENCIL_OFFSET];
let v = win_v[STENCIL_OFFSET];
// Compute the diffusion gradient for U and V
let [full_u, full_v] = (win_u.into_iter())
.zip(win_v)
.zip(STENCIL_WEIGHTS.into_iter().flatten())
.fold(
[0.; 2],
|[acc_u, acc_v], ((&stencil_u, &stencil_v), weight)| {
[acc_u + weight * (stencil_u - u), acc_v + weight * (stencil_v - v)]
},
);
// Rest of the computation is unchanged
let uv_square = u * v * v;
let du = DIFFUSION_RATE_U * full_u - uv_square + opts.feedrate * (1.0 - u);
let dv = DIFFUSION_RATE_V * full_v + uv_square
- (opts.feedrate + opts.killrate) * v;
*out_u = u + du * opts.deltat;
*out_v = v + dv * opts.deltat;
}
);You will probably not be surprised to learn that in addition to being much easier to read and maintain, this Rust code will also compile down to much faster machine code.
But of course, it does not fully resolve the problem at hand, as we are not computing the edge values of the chemical species concentration correctly. We are going to need either a separate code paths or a data layout change to get there.
Exercise
For this exercise, we give you two possible strategies:
- Write separate code to handle the boundary values using the logic of the initial naive code. If you choose this path, keep around the initial stencil update loop in addition to the regularized loop above, you will need it to handle the edge values.
- Change the code that allocates the simulation’s data storage and writes
output down to HDF5 in order to allocate one extra element on each side of
the concentration arrays. Keep these elements equal to zero throughout the
computation, and use a
centerslice analogous to the one above in order to only emit results in the relevant region of the concentration array.
If you are undecided, I would advise going for the first option, as the resulting regular/irregular code split will give you an early taste of things to come in the next chapter.
Including, in larger numerical codebases, code that you may have little control over.
Basic SIMD
By now, we have largely resolved the slicing-induced performance bottleneck that plagued our initial naive simulation code. But as we have seen in the introductory chapters, there is still much to do before our Rust code puts hardware to good use.
In particular, we are not using SIMD yet, for reasons that will become clear once you realize that we are effectively computing one tiny dot product per output concentration value. This is obviously one first thing that we are going to need to fix in order to use our hardware efficiently.
Picking a granularity
This computation is complex enough that there are actually two different ways to vectorize it:
- We could try to internally vectorize the computation of a single (u, v) concentration value pair. The diffusion gradient computation, which is basically a dot product, would be an obvious candidate for vectorization as we already know how to compute SIMD dot products.
- On each iteration of the loop, we could try to compute not just one pair of concentration values, but one full SIMD vector of concentration values for each chemical species. Basically, anywhere the current code manipulates a single floating-point number, the new code would manipulate a full SIMD vector of floating-point numbers instead.
Are there any reasons to prefer one of these two options over the other? Indeed there are:
- Option 1 only lets us vectorize a subset of the computation, while option 2 lets us vectorize the full computation. Because Amdhal’s law is a thing, this is an argument in favor of option 2.
- Option 1 involves performing SIMD horizontal reductions (going from a SIMD vector of inputs to a single floating-point output) in a tight loop. In contrast, option 2 involves no horizontal reduction. Because horizontal reductions are slow, this is an argument in favor of option 2.
- Option 2 only makes sense if the entire computation is done using SIMD. This
will consume more SIMD execution resources (CPU SIMD registers, etc) and make
our life difficult in the presence of constructs that do not map well to SIMD
like
if/elseand loop early exits. Therefore, on certain hardware architectures or for sufficiently complex code, only option 1 (fine-grained SIMD) may be available.
In this school, we are using x86 CPUs, which perform scalar floating-point operations using the same CPU resources as SIMD operations. Therefore, switching to SIMD will not change the CPU resource usage profile, and there is no risk of blowing a CPU hardware budget that we used to fit in before.
And on the code side, our computation is simple enough that translating it to SIMD operations is not super-difficult. So overall, for this computation, option 2 (coarse-grained SIMD) is the clear winner.
Visualizing the goal
As it turns out, the simplest way we can go about introducing SIMD in this computation is to make our input and output windows wider, as we will now visually demonstrate.
Currently, we are jointly iterating over input windows and output values as in the following sketch…
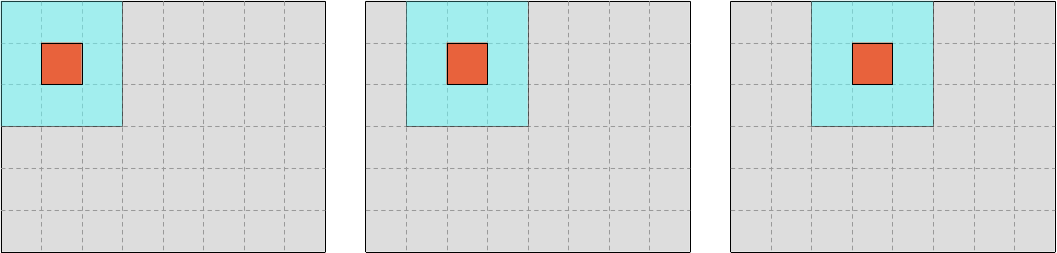
…where the gray rectangle represents the overall dataset, the blue square represents the location of the input values that we are reading at each step of the update loop, and the red square represents the location of the output value that we are writing at each step of the update loop.
Our goal in this chapter will be to instead iterate over wider (but equally high) input and output slices, where the output region is as wide as a hardware SIMD vector, and the input region follows by adding one data point on each side.
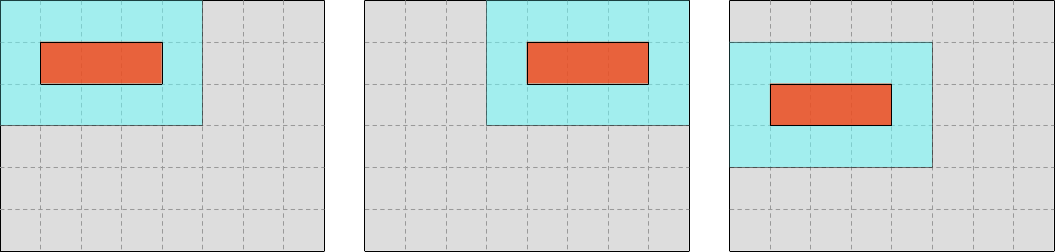
Once we get there, introducing SIMD will “just” be a matter of replacing each scalar operation in our algorithm with a SIMD operation that targets a SIMD vector starting at the same memory location.
Breaking the symmetry
This move to wider input and output windows is not without consequences, however. It breaks the symmetry between rows and columns that has existed so far in our computation, allowing us to perform 2D iteration over the dataset with a single, 1D-feeling loop.
Now we are going to need an outer loop over lines of output…
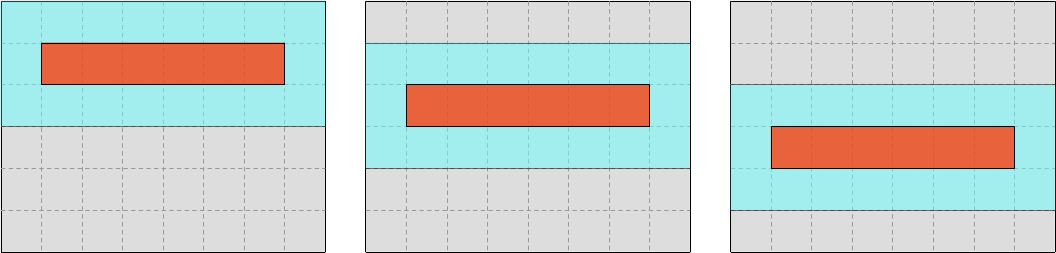
…and, under that outer loop, an inner loop over SIMD vectors within each line.
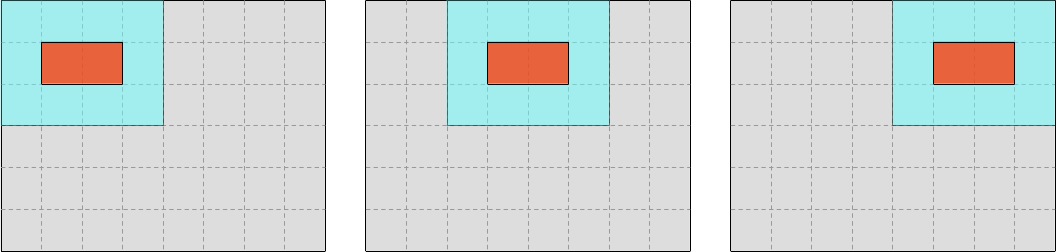
We are also going to need to decide how to handle the case where the number of output elements within a line is not a multiple of the SIMD vector length:
- Do we simply forbid this to keep our code simple, at the cost of making users angry?
- Do we handle the remaining elements of each line using a scalar computation?
- Do we start by slicing up a “regular” part of the computation that has all the right properties for SIMD, processing the rest (including the edges of the simulation domain) using a more general but slower implementation?
There is no single right answer here, and the right way to go about this will depend on the technical and political specifics of the software that you are writing. But option 3 is a good tradeoff if you are unsure, and may therefore be a good starting point.
The “easy” part
We will now start implementing a subset of the update loop that only works on the part of the simulation domain that is easy to handle using SIMD.
First of all, assuming a pre-existing SIMD_WIDTH constant which contains our
SIMD vector width, we can select an output region that covers all previous
output rows, but only a number of columns that corresponds to an integer number
of SIMD vectors:
use ndarray::s;
let [num_rows, num_cols] = start.shape();
let num_regular_cols = ((num_cols - 2) / SIMD_WIDTH) * SIMD_WIDTH;
let regular_output = s![1..(num_rows - 1), 1..=num_regular_cols];
let mut regular_out_u = end.u.slice_mut(regular_output);
let mut regular_out_v = end.v.slice_mut(regular_output);
let regular_input = s![0..num_rows, 0..=(num_regular_cols + 1)];
let regular_in_u = start.u.slice(regular_input);
let regular_in_v = start.v.slice(regular_input);We can then iterate over rows of the output arrays and the corresponding windows of three consecutive input rows in the input arrays…
use ndarray::Axis;
let out_rows = (regular_out_u.rows_mut().into_iter()).zip(regular_out_v.rows_mut());
let in_windows = (regular_in_u.axis_windows(Axis(0), 3).into_iter())
.zip(regular_in_v.axis_windows(Axis(0), 3));
// Cannot use `ndarray::azip` here because it does not support jointly
// iterating over ArrayViews of different dimensionality (here 1D and 2D)
for ((mut out_row_u, mut out_row_v), (win_u, win_v)) in out_rows.zip(in_windows) {
// TODO: Process a row of output here
}…and within that outer loop, we can have an inner loop on SIMD-sized chunks within each row of the output matrix, along with the corresponding input windows.
let out_chunks = (out_row_u.exact_chunks_mut(SIMD_WIDTH).into_iter())
.zip(out_row_v.exact_chunks_mut(SIMD_WIDTH));
let in_windows = (win_u
.axis_windows(Axis(1), SIMD_WIDTH + 2)
.into_iter()
.step_by(SIMD_WIDTH))
.zip(
win_v
.axis_windows(Axis(1), SIMD_WIDTH + 2)
.into_iter()
.step_by(SIMD_WIDTH),
);
// Cannot use `ndarray::azip` here for the same reason as before
for ((mut out_chunk_u, mut out_chunk_v), (win_u, win_v)) in out_chunks.zip(in_windows) {
// TODO: Process a SIMD-sized chunk of output here
}Finally, within the body of that inner loop, we can introduce a SIMD version of
our regularized update algorithm, using std::simd:
use crate::data::Float;
use std::simd::prelude::*;
// Access the SIMD data corresponding to the center concentration
let simd_input = s![
STENCIL_OFFSET[0],
STENCIL_OFFSET[1]..SIMD_WIDTH + STENCIL_OFFSET[1],
];
let u = win_u.slice(simd_input);
let v = win_v.slice(simd_input);
// Load it as a SIMD vector
//
// The conversion from ArrayView to slice can fail if the data is
// not contiguous in memory. In this case, we know it should always
// be contiguous, so we can use unwrap() which panics otherwise.
type Vector = Simd<Float, SIMD_WIDTH>;
let u = Vector::from_slice(u.as_slice().unwrap());
let v = Vector::from_slice(v.as_slice().unwrap());
// Compute the diffusion gradient for U and V
let [full_u, full_v] = (win_u.windows([1, SIMD_WIDTH]).into_iter())
.zip(win_v.windows([1, SIMD_WIDTH]))
.zip(STENCIL_WEIGHTS.into_iter().flatten())
.fold(
[Vector::splat(0.); 2],
|[acc_u, acc_v], ((stencil_u, stencil_v), weight)| {
let stencil_u = Vector::from_slice(stencil_u.as_slice().unwrap());
let stencil_v = Vector::from_slice(stencil_v.as_slice().unwrap());
let weight = Vector::splat(weight);
[
acc_u + weight * (stencil_u - u),
acc_v + weight * (stencil_v - v),
]
},
);
// Compute SIMD versions of all the float constants that we use
let diffusion_rate_u = Vector::splat(DIFFUSION_RATE_U);
let diffusion_rate_v = Vector::splat(DIFFUSION_RATE_V);
let feedrate = Vector::splat(opts.feedrate);
let killrate = Vector::splat(opts.killrate);
let deltat = Vector::splat(opts.deltat);
let ones = Vector::splat(1.0);
// Compute the output values of u and v
let uv_square = u * v * v;
let du = diffusion_rate_u * full_u - uv_square + feedrate * (ones - u);
let dv = diffusion_rate_v * full_v + uv_square - (feedrate + killrate) * v;
let out_u = u + du * deltat;
let out_v = v + dv * deltat;
// Store the output values of u and v
out_u.copy_to_slice(out_chunk_u.as_slice_mut().unwrap());
out_v.copy_to_slice(out_chunk_v.as_slice_mut().unwrap());The main highlights here are that
- We can convert back from an
ArrayViewthat has contiguous storage to a standard Rust slice for the purpose of interacting with the SIMD API, which doesn’t know aboutndarray. - We can still use 1D-like iteration in our inner diffusion gradient loop, it is only the outer loops on output elements that are affected by the change of algorithm.
- Floating point constants can be turned into SIMD vectors whose elements are
all equal to the constant by using
Simd::splat, which on x86 maps to the hardwarebroadcastssinstruction. - Adding SIMD to any nontrivial codebase without turning it into an unreadable mess is a major software engineering challenge1.
Finally, because we are using the experimental nightly-only std::simd API, we
will need to enable it by adding the associated #![feature(portable_simd)]
directive to the top of exercises/src/lib.rs (assuming this is where you have
put the update function’s implementation).
Exercise
Make a backup of your current update function, you will need some of it to handle the irregular subset of the data (simulation domain edges, extra columns that do not fit a SIMD vector nicely, etc).
Then integrate the above regularized SIMD algorithm into your code, and complete
it by adding function multiversioning through the multiversion crate (as
presented in the SIMD chapter), so that you get something to put
inside of this SIMD_WIDTH constant:
const SIMD_WIDTH: usize = ...;Finally, make your update function handle the irregular part of the simulation domain by reusing your former implementation.
Though we will see in the next chapter that SIMD can be made both easier and more efficient, if we are willing to sacrifice any hope of interoperability with other code and rearrange data into a highly non-obvious layout.
Advanced SIMD
The SIMD version of the Gray-Scott simulation that we have implemented in the previous chapter has two significant issues that would be worth improving upon:
- The SIMD update loop is significantly more complex than the regularized scalar version.
- Its memory accesses suffer from alignment issues that will reduce runtime performance. On x86 specifically, at least 1 in 4 memory access1 will be slowed down in SSE builds, 1 in 2 in AVX builds, and every memory access is in AVX-512 builds. So the more advanced your CPU’s SIMD instruction set, the worse the relative penalty becomes.
Interestingly, there is a way to improve the code on both of these dimensions, and simplify the update loop immensely while improving its runtime performance. However, there is no free lunch in programming, and we will need to pay a significant price in exchange for these improvements:
- The layout of numerical data in RAM will become less obvious and harder to reason about.
- Interoperability with other code that expects a more standard memory layout, such as the HDF5 I/O library, will become more difficult and have higher runtime overhead.
- We will need to give up on the idea that we can allow users to pick a simulation domain of any size they like, and enforce some hardware-originated constraints on the problem size.
Assuming these are constraints that you can live with, let us now get started!
A new data layout
So far, we have been laying out our 2D concentration data in the following straightforward manner:
Now let us assume that we want to use SIMD vectors of width 3. We will start by slicing our scalar data into three equally tall horizontal slices, one per SIMD vector lane…
…and then we will shuffle around the data such that if we read it from left to right, we now get the first column of the former top block, followed by the first column of the middle block, followed by the first column of the bottom block, followed by the second column of the top block, and so on:
At this point, you may reasonably be skeptical that this is an improvement. But before you start doubting my sanity, let us look at the same data layout again, with a different visualization that emphasizes aligned SIMD vectors:
And now, let us assume that we want to compute the output aligned SIMD vector at coordinate (1, 1) from the top-left corner in this SIMD super-structure:
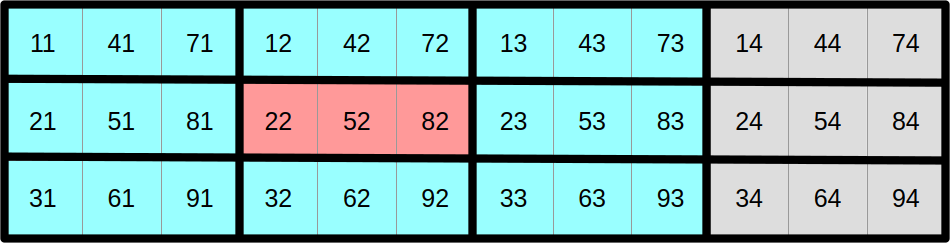
As it turns out, we can do it using a read and write pattern that looks exactly like the regularized scalar stencil that we have used before, but this time using correctly aligned SIMD vectors instead of scalar data points. Hopefully, by now, you will agree that we are getting somewhere.
Now that we have a very efficient data access pattern at the center of the simulation domain, let us reduce the need for special edge handling in order to make our simulation update loop even simpler. The left and right edges are easy, as we can just add zeroed out vectors on both sides and be careful not to overwrite them later in the computation…

…but the top and bottom edges need more care. The upper neighbours of scalar elements at coordinates 1x is 0 and the lower neighbours of scalar elements at coordinates 9x are easy because they can also be permanently set to zero:
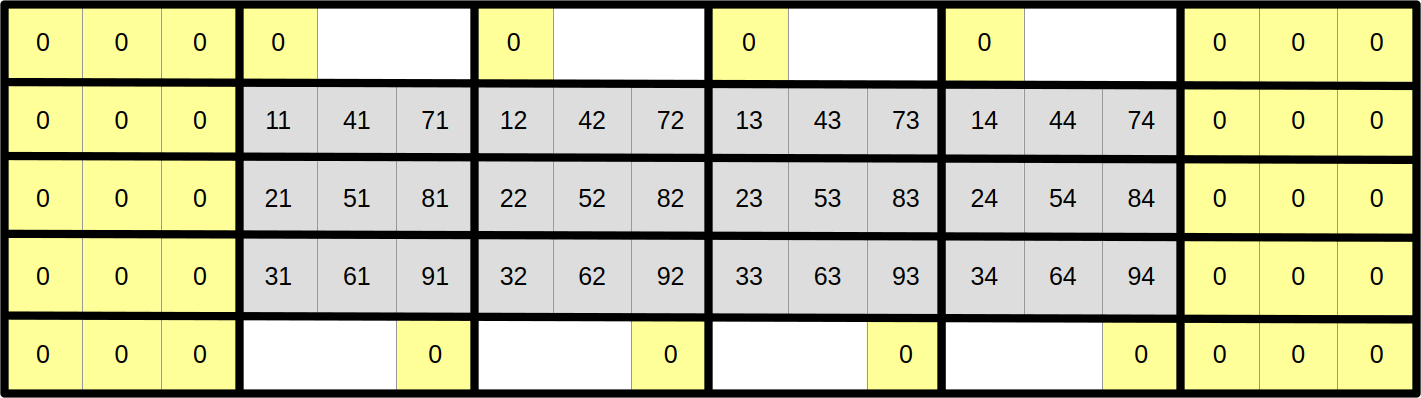
However, other top and bottom scalar elements will somehow need to wrap around the 2D array and shift by one column in order to access their upper and lower neighbors:
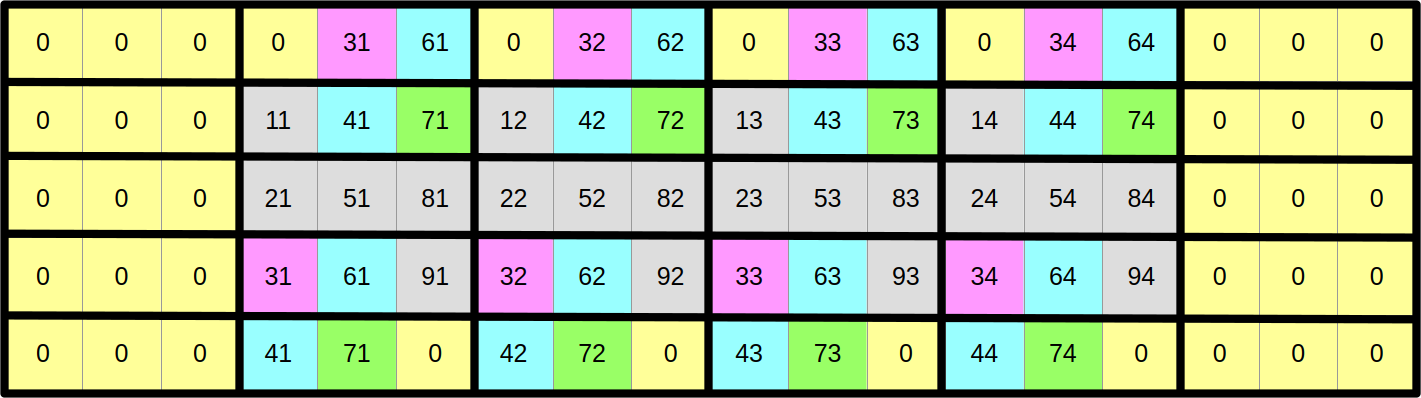
There are several ways to implement this wrapping around and column-shifting in a SIMD computation. In this course, we will use the approach of updating the upper and lower rows of the array after each computation step in order to keep them in sync with the matching rows at the opposite end of the array. This wrapping around and shifting will be done using an advanced family of SIMD instructions known as swizzles.
Even though SIMD swizzles are relatively expensive CPU instructions, especially on x86, their overhead will be imperceptible for sufficiently tall simulation domains. That’s because we will only need to use them in order to update the top and bottom rows of the simulation, no matter how many rows the simulation domain has, whereas the rest of the simulation update loop has a computational cost that grows linearly with the number of simulation domain rows.
Adjusting the code
Data layout changes can be an extremely powerful tool to optimize your code. And generally speaking there will always be a limit to how much performance you can gain without changing how data is laid out in files and in RAM.
But the motto of this course is that there is no free lunch in programming, and in this particular case, the price to pay for this change will be a major code rewrite to adapt almost every piece of code that we have previously written to the new data layout.2
U and V concentration storage
Our core UV struct has so far stored scalar data, but now we will make it
store SIMD vectors instead. We want to do it for two reasons:
- It will make our SIMD update loop code much simpler and clearer.
- It will tell the compiler that we want to do SIMD with a certain width and the associated memory allocation should be correctly aligned for this purpose.
The data structure definition therefore changes to this:
use std::simd::{prelude::*, LaneCount, SupportedLaneCount};
/// Type alias for a SIMD vector of floats, we're going to use this type a lot
pub type Vector<const SIMD_WIDTH: usize> = Simd<Float, SIMD_WIDTH>;
/// Storage for the concentrations of the U and V chemical species
pub struct UV<const SIMD_WIDTH: usize>
where
LaneCount<SIMD_WIDTH>: SupportedLaneCount,
{
pub u: Array2<Vector<SIMD_WIDTH>>,
pub v: Array2<Vector<SIMD_WIDTH>>,
}Notice that the UV struct definition must now be generic over the SIMD vector
width (reflecting the associated change in memory alignement in the underlying
Array2s), and that this genericity must be bounded by a where clause3
to indicate that not all usizes are valid SIMD vector widths.4
The methods of the UV type change as well, since now the associated impl
block must be made generic as well, and the implementation of the various
methods must adapt to the fact that now our inner storage is made of SIMD
vectors.
First the impl block will gain generics parameters, with bounds that match
those of the source type:
impl<const SIMD_WIDTH: usize> UV<SIMD_WIDTH>
where
LaneCount<SIMD_WIDTH>: SupportedLaneCount,
{
// TODO: Add methods here
}The reason why the impl blocks needs generics bounds as well is that this
gives the language syntax headroom to let you add methods that are specific to
one specific value of the generics parameters, like this:
impl UV<4> {
// TODO: Add code specific to vectors of width 4 here
}That being said, repeating bounds like this is certainly annoying in the common case, and there is a longstanding desire to add a way to tell the language “please just repeat the bounds of the type definitions”, using syntax like this:
impl UV<_> {
// TODO: Add generic code that works for all SIMD_WIDTHS here
}The interested reader is advised to use “implied bounds” as a search engine keyword, in order to learn more about how this could work, and why integrating this feature into Rust has not been as easy as initially envisioned.
The main UV::new() constructor changes a fair bit because it needs to account
for the fact that…
- There is now one extra SIMD vector on each side of the simulation domain
- The SIMD-optimized data layout is quite different, and mapping our original rectangular concentration pattern to is is non-trivial.
- To simplify this version of the code, we set the constraint that both the height and the width of the simulation domain must be a multiple of the SIMD vector width.
…which, when taken together, leads to this implementation:
fn new(num_scalar_rows: usize, num_scalar_cols: usize) -> Self {
// Enforce constraints of the new data layout
assert!(
(num_scalar_rows % SIMD_WIDTH == 0) && (num_scalar_cols % SIMD_WIDTH == 0),
"num_scalar_rows and num_scalar_cols must be a multiple of the SIMD vector width"
);
let num_center_rows = num_scalar_rows / SIMD_WIDTH;
let simd_shape = [num_center_rows + 2, num_scalar_cols + 2];
// Predicate which selects central rows and columns
let is_center = |simd_row, simd_col| {
simd_row >= 1
&& simd_row <= num_center_rows
&& simd_col >= 1
&& simd_col <= num_scalar_cols
};
// SIMDfied version of the scalar pattern, based on mapping SIMD vector
// position and SIMD lane indices to equivalent positions in the
// original scalar array.
//
// Initially, we zero out all edge elements. We will fix the top/bottom
// elements in a later step.
let pattern = |simd_row, simd_col| {
let elements: [Float; SIMD_WIDTH] = if is_center(simd_row, simd_col) {
std::array::from_fn(|simd_lane| {
let scalar_row = simd_row - 1 + simd_lane * num_center_rows;
let scalar_col = simd_col - 1;
(scalar_row >= (7 * num_scalar_rows / 16).saturating_sub(4)
&& scalar_row < (8 * num_scalar_rows / 16).saturating_sub(4)
&& scalar_col >= 7 * num_scalar_cols / 16
&& scalar_col < 8 * num_scalar_cols / 16) as u8 as Float
})
} else {
[0.0; SIMD_WIDTH]
};
Vector::from(elements)
};
// The next steps are very similar to the scalar version...
let u = Array2::from_shape_fn(simd_shape, |(simd_row, simd_col)| {
if is_center(simd_row, simd_col) {
Vector::splat(1.0) - pattern(simd_row, simd_col)
} else {
Vector::splat(0.0)
}
});
let v = Array2::from_shape_fn(simd_shape, |(simd_row, simd_col)| {
pattern(simd_row, simd_col)
});
let mut result = Self { u, v };
// ...except we must fix up the top and bottom rows of the simulation
// domain in order to achieve the intended data layout.
result.update_top_bottom();
result
}Notice the call to the new update_top_bottom() method, which is in charge of
calculating the top and bottom rows of the concentration array. We will get back
to how this method works in a bit.
The all-zeroes constructor changes very little in comparison, since when everything is zero, the order of scalar elements within the array does not matter:
/// Set up an all-zeroes chemical species concentration
fn zeroes(num_scalar_rows: usize, num_scalar_cols: usize) -> Self {
// Same idea as above
assert!(
(num_scalar_rows % SIMD_WIDTH == 0) && (num_scalar_cols % SIMD_WIDTH == 0),
"num_scalar_rows and num_scalar_cols must be a multiple of the SIMD vector width"
);
let num_simd_rows = num_scalar_rows / SIMD_WIDTH;
let simd_shape = [num_simd_rows + 2, num_scalar_cols + 2];
let u = Array2::default(simd_shape);
let v = Array2::default(simd_shape);
Self { u, v }
}The notion of shape becomes ambiguous in the new layout, because we need to
clarify whether we are talking about the logical size of the simulation domain
in scalar concentration data points, or its physical size in SIMD vector
elements. Therefore, the former shape() method is split into two methods, and
callers must be adapted to call the right method for their needs:
/// Get the number of rows and columns of the SIMD simulation domain
pub fn simd_shape(&self) -> [usize; 2] {
let shape = self.u.shape();
[shape[0], shape[1]]
}
/// Get the number of rows and columns of the scalar simulation domain
pub fn scalar_shape(&self) -> [usize; 2] {
let [simd_rows, simd_cols] = self.simd_shape();
[(simd_rows - 2) * SIMD_WIDTH, simd_cols - 2]
}…and finally, we get to discuss the process through which the top and bottom rows of the SIMD concentration array are updated:
use multiversion::multiversion;
use ndarray::s;
// ...
/// Update the top and bottom rows of all inner arrays of concentrations
///
/// This method must be called between the end of a simulation update step
/// and the beginning of the next step to sync up the top/bottom rows of the
/// SIMD data store. It can also be used to simplify initialization.
fn update_top_bottom(&mut self) {
// Due to a combination of language and compiler limitations, we
// currently need both function multiversioning and genericity over SIMD
// width here. See handouts for the full explanation.
#[multiversion(targets("x86_64+avx2+fma", "x86_64+avx", "x86_64+sse2"))]
fn update_array<const WIDTH: usize>(arr: &mut Array2<Vector<WIDTH>>)
where
LaneCount<WIDTH>: SupportedLaneCount,
{
// TODO: Implementation for one concentration array goes here
}
update_array(&mut self.u);
update_array(&mut self.v);
}First of all, we get this little eyesore of an inner function declaration:
#[multiversion(targets("x86_64+avx2+fma", "x86_64+avx", "x86_64+sse2"))]
fn update_array<const WIDTH: usize>(arr: &mut Array2<Vector<WIDTH>>)
where
LaneCount<WIDTH>: SupportedLaneCount,
{
// TODO: Top/bottom row update goes here
}It needs to have a multiversion attribute AND a generic signature due to a
combination of language and compiler limitations:
- Rust currently does not allow inner function declarations to access the
generic parameters of outer functions. Therefore, the inner function must be
made generic over
WIDTHeven though it will only be called for one specificSIMD_WIDTH. - Genericity over
SIMD_WIDTHis not enough to achieve optimal SIMD code generation, because by default, the compiler will only generate code for the lowest-common-denominator SIMD instruction set (SSE2 on x86_64), emulating wider vector widths using narrower SIMD operations. We still need function multi-versioning in order to generate one optimized code path per supported SIMD instruction set, and dispatch to the right code path at runtime.
Beyond that, the implementation is quite straightforward. First we extract the
two top and bottom rows of the concentration array using ndarray slicing,
ignoring the leftmost and rightmost element that we know to be zero…
// Select the top and bottom rows of the simulation domain
let shape = arr.shape();
let [num_simd_rows, num_cols] = [shape[0], shape[1]];
let horizontal_range = 1..(num_cols - 1);
let row_top = s![0, horizontal_range.clone()];
let row_after_top = s![1, horizontal_range.clone()];
let row_before_bottom = s![num_simd_rows - 2, horizontal_range.clone()];
let row_bottom = s![num_simd_rows - 1, horizontal_range];
// Extract the corresponding data slices
let (row_top, row_after_top, row_before_bottom, row_bottom) =
arr.multi_slice_mut((row_top, row_after_top, row_before_bottom, row_bottom));…and then we iterate over all SIMD vectors within the rows, generating “lane-shifted” versions using a combination of SIMD rotates and zero-assignment (which have wider hardware support than lane-shifting), and storing them on the opposite end of the array:
// Jointly iterate over all rows
ndarray::azip!((
vec_top in row_top,
&mut vec_after_top in row_after_top,
&mut vec_before_bottom in row_before_bottom,
vec_bottom in row_bottom
) {
// Top vector acquires the value of the before-bottom vector,
// rotated right by one lane and with the first element set to zero
let mut shifted_before_bottom = vec_before_bottom.rotate_elements_right::<1>();
shifted_before_bottom[0] = 0.0;
*vec_top = shifted_before_bottom;
// Bottom vector acquires the value of the after-top vector, rotated
// left by one lane and with the last element set to zero
let mut shifted_after_top = vec_after_top.rotate_elements_left::<1>();
shifted_after_top[WIDTH - 1] = 0.0;
*vec_bottom = shifted_after_top;
});Double buffering and the SIMD-scalar boundary
Because our new concentration storage has become generic over the width of the SIMD instruction set in use, our double buffer abstraction must become generic as well:
pub struct Concentrations<const SIMD_WIDTH: usize>
where
LaneCount<SIMD_WIDTH>: SupportedLaneCount,
{
buffers: [UV<SIMD_WIDTH>; 2],
src_is_1: bool,
}However, now is a good time to ask ourselves where we should put the boundary of code which must know about this genericity and the associated SIMD data storage. We do not want to simply propagate SIMD types everywhere because…
- It would make all the code generic, which as we have seen is a little annoying, and also slows compilation down (all SIMD-generic code is compiled once per possible hardware vector width).
- Some of our dependencies like
hdf5are lucky enough not to know or care about SIMD data types. At some point, before we hand over data to these dependencies, a conversion to the standard scalar layout will need to be performed.
Right now, the only point where the Concentrations::current() method is used
is when we hand over the current value of V species concentration array to HDF5
for the purpose of writing it out. Therefore, it is reasonable to use this
method as our SIMD-scalar boundary by turning it into a current_v() method
that returns a scalar view of the V concentration array, which is computed on
the fly whenever requested.
We can prepare for this by adding a new scalar array member to the
Concentrations struct…
pub struct Concentrations<const SIMD_WIDTH: usize>
where
LaneCount<SIMD_WIDTH>: SupportedLaneCount,
{
buffers: [UV<SIMD_WIDTH>; 2],
src_is_1: bool,
scalar_v: Array2<Float>, // <- New
}…and zero-initializing it in the Concentrations::new() constructor:
/// Set up the simulation state
pub fn new(num_scalar_rows: usize, num_scalar_cols: usize) -> Self {
Self {
buffers: [
UV::new(num_scalar_rows, num_scalar_cols),
UV::zeroes(num_scalar_rows, num_scalar_cols),
],
src_is_1: false,
scalar_v: Array2::zeros([num_scalar_rows, num_scalar_cols]), // <- New
}
}And finally, we must turn current() into current_v(), make it take &mut self instead of &self so that it can mutate the internal buffer, and make it
return a reference to the internal buffer:
/// Read out the current V species concentration
pub fn current_v(&mut self) -> &Array2<Float> {
let simd_v = &self.buffers[self.src_is_1 as usize].v;
// TODO: Compute scalar_v from simd_v
&self.scalar_v
}The rest of the double buffer does not change much, it is just a matter of…
- Adding generics in the right place
- Exposing new API distinctions that didn’t exist before between the scalar domain shape and the SIMD domain shape
- Updating the top and bottom rows of the SIMD dataset after each update.
impl<const SIMD_WIDTH: usize> Concentrations<SIMD_WIDTH>
where
LaneCount<SIMD_WIDTH>: SupportedLaneCount,
{
/// Set up the simulation state
pub fn new(num_scalar_rows: usize, num_scalar_cols: usize) -> Self {
Self {
buffers: [
UV::new(num_scalar_rows, num_scalar_cols),
UV::zeroes(num_scalar_rows, num_scalar_cols),
],
src_is_1: false,
scalar_v: Array2::zeros([num_scalar_rows, num_scalar_cols]),
}
}
/// Get the number of rows and columns of the SIMD simulation domain
pub fn simd_shape(&self) -> [usize; 2] {
self.buffers[0].simd_shape()
}
/// Get the number of rows and columns of the scalar simulation domain
pub fn scalar_shape(&self) -> [usize; 2] {
self.buffers[0].scalar_shape()
}
/// Read out the current V species concentration
pub fn current_v(&mut self) -> &Array2<Float> {
let simd_v = &self.buffers[self.src_is_1 as usize].v;
// TODO: Compute scalar_v from simd_v
&self.scalar_v
}
/// Run a simulation step
///
/// The user callback function `step` will be called with two inputs UVs:
/// one containing the initial species concentration at the start of the
/// simulation step, and one to receive the final species concentration that
/// the simulation step is in charge of generating.
///
/// The `step` callback needs not update the top and the bottom rows of the
/// SIMD arrays, it will be updated automatically.
pub fn update(&mut self, step: impl FnOnce(&UV<SIMD_WIDTH>, &mut UV<SIMD_WIDTH>)) {
let [ref mut uv_0, ref mut uv_1] = &mut self.buffers;
if self.src_is_1 {
step(uv_1, uv_0);
uv_0.update_top_bottom();
} else {
step(uv_0, uv_1);
uv_1.update_top_bottom();
}
self.src_is_1 = !self.src_is_1;
}
}But of course, there is a big devil in that TODO detail within the
implementation of current_v().
Going back to the scalar data layout
Let us go back to the virtual drawing board and fetch back our former schematic that illustrates the mapping between the SIMD and scalar data layout:
It may not be clear from a look at it, but given a set of SIMD_WIDTH
consecutive vectors of SIMD data, it is possible to efficiently reconstruct a
SIMD_WIDTH vectors of scalar data.
In other words, there are reasonably efficient SIMD instructions for performing this transformation:
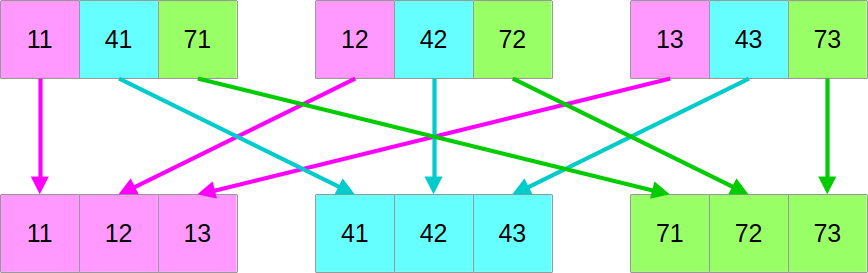
Unfortunately, the logic of these instructions is highly hardware-dependent,
and Rust’s std::simd has so far shied away from implementing higher-level
abstract operations that involve more than two input SIMD vectors. Therefore, we
will have to rely on autovectorization for this as of today.
Also, to avoid complicating the code with a scalar fallback, we should
enforce that the number of columns in the underlying scalar array is a multiple
of SIMD_WIDTH. Which is reasonable given that we already enforce this for the
number of rows. This is already done in the UV constructors that you have been
provided with above.
But given these two prerequisites, here is a current_v() implementation that
does the job:
use ndarray::ArrayView2;
// ...
/// Read out the current V species concentration
pub fn current_v(&mut self) -> &Array2<Float> {
// Extract the center region of the V input concentration table
let uv = &self.buffers[self.src_is_1 as usize];
let [simd_rows, simd_cols] = uv.simd_shape();
let simd_v_center = uv.v.slice(s![1..simd_rows - 1, 1..simd_cols - 1]);
// multiversion does not support methods that take `self` yet, so we must
// use an inner function for now.
#[multiversion(targets("x86_64+avx2+fma", "x86_64+avx", "x86_64+sse2"))]
fn make_scalar<const WIDTH: usize>(
simd_center: ArrayView2<Vector<WIDTH>>,
scalar_output: &mut Array2<Float>,
) where
LaneCount<WIDTH>: SupportedLaneCount,
{
// Iterate over SIMD rows...
let simd_center_rows = simd_center.nrows();
for (simd_row_idx, row) in simd_center.rows().into_iter().enumerate() {
// ...and over chunks of WIDTH vectors within each rows
for (simd_chunk_idx, chunk) in row.exact_chunks(WIDTH).into_iter().enumerate() {
// Convert this chunk of SIMD vectors to the scalar layout,
// relying on autovectorization for performance for now...
let transposed: [[Float; WIDTH]; WIDTH] = std::array::from_fn(|outer_idx| {
std::array::from_fn(|inner_idx| chunk[inner_idx][outer_idx])
});
// ...then store these scalar vectors in the right location
for (vec_idx, data) in transposed.into_iter().enumerate() {
let scalar_row = simd_row_idx + vec_idx * simd_center_rows;
let scalar_col = simd_chunk_idx * WIDTH;
scalar_output
.slice_mut(s![scalar_row, scalar_col..scalar_col + WIDTH])
.as_slice_mut()
.unwrap()
.copy_from_slice(&data)
}
}
}
}
make_scalar(simd_v_center.view(), &mut self.scalar_v);
// Now scalar_v contains the scalar version of v
&self.scalar_v
}As you may guess, this implementation could be optimized further…
- The autovectorized transpose could be replaced with hardware-specific SIMD swizzles.
- The repeated slicing of
scalar_vcould be replaced with a set of iterators that yield the right output chunks without any risk of unelided bounds checks.
…but given that even the most optimized data transpose is going to be costly due to how hardware works, it would probably best to optimize by simply saving scalar output less often!
The new simulation kernel
Finally, after going through all of this trouble, we can adapt the heart of the
simulation, the update() loop, to the new data layout:
use std::simd::{LaneCount, SupportedLaneCount};
/// Simulation update function
#[multiversion(targets("x86_64+avx2+fma", "x86_64+avx", "x86_64+sse2"))]
pub fn update<const SIMD_WIDTH: usize>(
opts: &UpdateOptions,
start: &UV<SIMD_WIDTH>,
end: &mut UV<SIMD_WIDTH>,
) where
LaneCount<SIMD_WIDTH>: SupportedLaneCount,
{
let [num_simd_rows, num_simd_cols] = start.simd_shape();
let output_range = s![1..=(num_simd_rows - 2), 1..=(num_simd_cols - 2)];
ndarray::azip!((
win_u in start.u.windows([3, 3]),
win_v in start.v.windows([3, 3]),
out_u in end.u.slice_mut(output_range),
out_v in end.v.slice_mut(output_range),
) {
// Access the SIMD data corresponding to the center concentration
let u = win_u[STENCIL_OFFSET];
let v = win_v[STENCIL_OFFSET];
// Compute the diffusion gradient for U and V
let [full_u, full_v] = (win_u.into_iter())
.zip(win_v)
.zip(STENCIL_WEIGHTS.into_iter().flatten())
.fold(
[Vector::splat(0.); 2],
|[acc_u, acc_v], ((stencil_u, stencil_v), weight)| {
let weight = Vector::splat(weight);
[
acc_u + weight * (stencil_u - u),
acc_v + weight * (stencil_v - v),
]
},
);
// Compute SIMD versions of all the float constants that we use
let diffusion_rate_u = Vector::splat(DIFFUSION_RATE_U);
let diffusion_rate_v = Vector::splat(DIFFUSION_RATE_V);
let feedrate = Vector::splat(opts.feedrate);
let killrate = Vector::splat(opts.killrate);
let deltat = Vector::splat(opts.deltat);
let ones = Vector::splat(1.0);
// Compute the output values of u and v
let uv_square = u * v * v;
let du = diffusion_rate_u * full_u - uv_square + feedrate * (ones - u);
let dv = diffusion_rate_v * full_v + uv_square - (feedrate + killrate) * v;
*out_u = u + du * deltat;
*out_v = v + dv * deltat;
});
}Notice the following:
- This code looks a lot simpler and closer to the regularized scalar code than the previous SIMD code which tried to adjust to the scalar data layout. And that’s all there is to it. No need for a separate update code path to handle the edges of the simulation domain!
- The SIMD vector width is not anymore an implementation detail that can be contained within the scope of this function, as it appears in the input and output types. Therefore, function multiversioning alone is not enough and we need genericity over the SIMD width too.
Adapting run_simulation() and the HDF5Writer
The remaining changes in the shared computation code are minor. Since our
simulation runner allocates the concentration arrays, it must now become generic
over the SIMD vector type and adapt to the new Concentrations API…
/// Simulation runner, with a user-specified concentration update function
pub fn run_simulation<const SIMD_WIDTH: usize>(
opts: &RunnerOptions,
// Notice that we must use FnMut here because the update function can be
// called multiple times, which FnOnce does not allow.
mut update: impl FnMut(&UV<SIMD_WIDTH>, &mut UV<SIMD_WIDTH>),
) -> hdf5::Result<()>
where
LaneCount<SIMD_WIDTH>: SupportedLaneCount,
{
// Set up the concentrations buffer
let mut concentrations = Concentrations::new(opts.num_rows, opts.num_cols);
// Set up HDF5 I/O
let mut hdf5 = HDF5Writer::create(
&opts.file_name,
concentrations.scalar_shape(),
opts.num_output_steps,
)?;
// Produce the requested amount of concentration arrays
for _ in 0..opts.num_output_steps {
// Run a number of simulation steps
for _ in 0..opts.compute_steps_per_output_step {
// Update the concentrations of the U and V chemical species
concentrations.update(&mut update);
}
// Write down the current simulation output
hdf5.write(concentrations.current_v())?;
}
// Close the HDF5 file
hdf5.close()
}…while the write() method of the HDF5Writer must adapt to the fact that it
now only has access to the V species’ concentration, not the full dataset:
use ndarray::Array2;
// ...
/// Write a new V species concentration array to the file
pub fn write(&mut self, result_v: &Array2<Float>) -> hdf5::Result<()> {
self.dataset
.write_slice(result_v, (self.position, .., ..))?;
self.position += 1;
Ok(())
}Exercise
Integrate all of these changes into your code repository. Then adjust both
the microbenchmark at benches/simulate.rs and the main simulation binary at
src/bin/simulate.rs to call the new run_simulation() and update()
function.
You will need to use one final instance of function multiversioning in order to
determine the appropriate SIMD_WIDTH inside of the top-level binaries. See
our initial SIMD chapter for an example of how this is done.
In the case of microbenchmarks, you will also need to tune the loop on problem sizes in order to stop running benchmarks on the 4x4 problem size, which is not supported by this implementation.
Add a microbenchmark that measures the overhead of converting data from the SIMD to the scalar data layout, complementing the simulation update microbenchmark that you already have.
And finally, measure the impact of the new data layout on the performance of simulation updates.
Unfortunately, you may find the results to be a little disappointing. The why and how of this disappointment will be covered in the next chapter.
Any memory access that straddles a cache line boundary must load/store two cache lines instead of one, so the minimum penalty for these accesses is a 2x slowdown. Specific CPU architectures may come with higher misaligned memory access penalties, for example some RISC CPUs do not support unaligned memory accesses at all so every unaligned memory access must be decomposed in two memory accesses as described above.
The high software development costs of data layout changes are often used as an excuse not to do them. However, this is looking at the problem backwards. Data layout changes which are performed early in a program’s lifetime have a somewhat reasonable cost, so that actual issue here is starting to expose data-based interfaces and have other codes rely on them before your code is actually ready to commit to a stable data layout. Which should not be done until the end of the performance optimization process. This means that contrary to common “premature optimization is the root of all evil” programmer folk wisdom, there is actually a right time to do performance optimizations in a software project, and that time should not be at the very end of the development process, but rather as soon as you have tests to assess that your optimizations are not breaking anything and microbenchmarks to measure the impact of your optimizations.
We do not have the time to explore Rust genericity in this short course, but in a nutshell generic Rust code must be defined in such a way that it is either valid for all possible values of the generic parameters, or spells out what constitutes a valid generic parameter value. This ensures that instantiation-time errors caused by use of invalid generics parameters remain short and easy to understand in Rust, which overall makes Rust generics a lot more pleasant to use than C++ templates.
Some variation of this is needed because the LLVM backend underneath the
rustc compiler will crash the build if it is ever exposed a SIMD
vector width value that it does not expect, which is basically anything
but a power of two. But there are ongoing discussions on whether
SupportedLaneCount is the right way to it. Therefore, be aware that this
part of the std::simd API may change before stabilization.
An inlining puzzle
A major promise of C++, which was inherited by Rust, is that it should be possible to write reasonably straightforward high-level code, which compiles down to highly optimized machine code, by virtue of providing the compiler optimizer with all the information it needs to remove the high-level abstraction overhead at compile time.
Unfortunately, this promise comes with a footnote concerning function inlining:
- The process of turning high-level abstractions into efficient machine code vitally depends on a particular compiler optimization known as inline expansion or inlining. This optimization revolves around strategically copying and pasting the code of a function into its callers when it seems worthwhile, which enables many more optimizations down the line by letting the compiler specialize the function’s code for the context in which it is being called.
- Compiler optimizers decide whether to inline a function or not based on heuristics, and sometimes the heuristics is wrong and decides not to inline a function which should be inlined. This can result in an enormous runtime performance penalty.
In our case, as a quick run through a profiler will tell you, the performance problems that were observed at the end of the last chapter come from the fact that the compiler did not inline some iterator-related functions that are key to our code’s performance.
Available tools for inlining issues
When the function that is not inlined is a function that you wrote, there is an
easy fix. Just annotate the function that fails to inline properly with an
#[inline].
This will adjust the compiler optimizer’s cost model concerning this function,
and increase the odds that it does get inlined.
Most of the time, using #[inline] will be enough to restore inlining where it
should happen, and bring back the runtime performance that you would expect. But
unfortunately, #[inline] is just a hint, and the compiler’s optimizer may
occasionally refuse to take the hint and insist that in its machine-opinion, a
function really should not be inlined.
For those difficult situations, Rust provides you with #[inline(always)],
which is a much stronger hint that a function should always be inlined, even
in debug builds. Basically, if it is at all possible to inline a function that
is annotated with #[inline(always)]1, the compiler will inline it.
Unfortunately, while all of this is useful, it does not address one important use case: what should you do when the function that fails to inline is not in your code, but in a different library like one of your dependencies or the standard library, as happens in our case?
When this happens, you basically have three options:
- Get in touch with the developers of that library and try to get them to add
#[inline]directives in the right place. This works, but can take a while, and may fail if the authors of the library are not convinced that most users need inlining for runtime performance.2 - Tweak the code in the hope of getting it into a shape that inlines better.
- Roll your own version of the affected function(s), applying as much inlining directives as necessary to get the performance that you want.
For practical reasons3, this chapter will cover the last two options.
Locating the bad inlining
The inlining failures that are killing our performance stick out in the output
of perf report.

There are two hot functions here that should be inlined into their caller, but are not:
- The
next()method of our zipped iterator over window elements and stencil weights. Failing to inline this will increase the cost of each loop iteration by some amount, since now iteration variables will need to be pushed to the stack and popped back when they could stay resident in CPU registers instead. This is already quite bad in such a tight loop. - The
ndarray::zip::Zip::inner()method that performs the iteration over zipped iterators and does the actual computation is the biggest problem, however. Failing to inline this function into its multi-versioned caller breaks function multi-versioning, because the out-lined version will not be multiversioned. Therefore, it will only be compiled for the lowest denominator x86_64 SIMD instruction set of SSE2, which will cost us a lot of SIMD performance.
The first issue is actually surprisingly easy to resolve, once you know the trick. Just replace the 1D-style flattened iterator that makes the compiler optimizer choke with a version that separates the iteration over rows and columns of data:
// We give up on this...
(win_u.into_iter())
.zip(win_v)
.zip(STENCIL_WEIGHTS.into_iter().flatten())
// ...and instead go for this:
(win_u.rows().into_iter())
.zip(win_v.rows())
.zip(STENCIL_WEIGHTS)
.flat_map(|((u_row, v_row), weights_row)| {
(u_row.into_iter().copied())
.zip(v_row.into_iter().copied())
.zip(weights_row)
})As it turns out, the compiler has an easier time inlining through two layers of simple iteration than one layer of complex iteration, which is annoying but fair enough.
The second issue, however, is more difficult to resolve. ndarray’s
producer-zipping code is quite complex because it tries to support arrays of
arbitrary dimensionality, storage backend, and layout. Therefore, the amount of
code that would need to be marked #[inline] would be quite large, and there is
a relatively high risk that upstream would reject an associated pull request
because it could have unforeseen side-effects on other code that calls
ndarray::azip!().4
Hence we are going to go for a different approach, and instead roll our own
4-arrays-zipping iterator that is specialized for our needs… and marked
#[inline] the way we want it.
Introducing unsafe
A key design goal of Rust is that most of the code that you write should be proven to be type-safe, memory-safe and thread-safe, either at compile time or via runtime checks. For concision reasons, code that achieves the combination of these three properties is referred to as “safe code”.
Sadly, Rust cannot extend this proof to 100% of your code for two important reasons:
- There are useful software operations whose correctness cannot be proven at compile-time. Think about, for example, calling into a third-party library that is implemented in C/++. Since code written in these languages is not proven to be safe at compile time and does not formally document its runtime safety invariants, there is no way for the Rust compiler to prove that such a function call is safe. Yet being able to interoperate with the existing ecosystem of C/++ code is a very important asset that most Rust programmers would not want to give up on.
- Runtime checks come at a runtime performance cost, unless they are eliminated by the compiler’s optimizer. Unfortunately, compiler optimizers are not very good at this job, and it is very common for them to leave around runtime safety checks in situations where a human could easily prove that they will never be triggered. The associated performance cost may not be acceptable to programs with strict runtime performance requirements.
As a compromise, Rust therefore provides access to supplementary operations of
unproven safety, whose use is guarded by the unsafe keyword. They have various
uses, but for our purposes, the operations of highest interest will be those
that replicate standard library constructs that involve safety checks, but
without the safety checks. Instead of crashing the program at runtime on
erronerous usage, these unsafe operations will instead trigger undefined
behavior and let the compiler trash your program in unpredictable ways, like
most C/++ operations do.
The intended use of these unsafe operations is of course not to make Rust a
C/++-like undefined behavior free-for-all, turning all of the hard-earned
language safety guarantees into a fragile illusion that shatters on the first
use of the unsafe keyword. Instead, unsafe operations are meant to be used
inside by the implementation of safe operations3, in order to do things that
the safe subset of the language cannot currently do due to compiler limitations,
like safely indexing into arrays at a known-good position without paying the
price of runtime bound checks.
As you may guess by now, the iterators of all basic collection types (arrays,
Vecs…) are implemented using unsafe code. And so are the iterators of
ndarray’s multidimensional arrays.
Of course, use of unsafe code is not without risks. The human proof backing the
implementation of safe operations may be wrong, and let the risk of Undefined
Behavior (UB) slip through, which is why frivolous use of unsafe is highly
frowned upon in the Rust community. In a nutshell, unsafe code authors must keep
in mind that…
unsafecode should only be used in situations where there is no safe way to perform the task. The Rust community’s tolerance for convoluted safe code that improve compiler optimizations through unnatural contortions is much higher than forunsafecode that could be safe.- If a function is not marked as
unsafe, there must be no combination of inputs that can lead to the emergence of undefined behavior when it is called. - If a function is marked as
unsafe, its documentation must clearly spell out the safety contract that must be followed to avoid undefined behavior. This is needed so that users of the unsafe function know how to correctly use it later on.
An optimized iterator
This is an optimized version of our lockstep iteration pattern, implemented using unsafe code:
use ndarray::{ArrayView2, ShapeBuilder};
/// Optimized iterator over stencil output locations and input windows
#[inline]
pub fn stencil_iter<'data, const SIMD_WIDTH: usize>(
start: &'data UV<SIMD_WIDTH>,
end: &'data mut UV<SIMD_WIDTH>,
) -> impl Iterator<
Item = (
ArrayView2<'data, Vector<SIMD_WIDTH>>, // <- Input u window
ArrayView2<'data, Vector<SIMD_WIDTH>>, // <- Input v window
&'data mut Vector<SIMD_WIDTH>, // <- Output u
&'data mut Vector<SIMD_WIDTH>, // <- Output v
),
>
where
LaneCount<SIMD_WIDTH>: SupportedLaneCount,
{
// Assert that the sub-grids all have the same memory layout.
// This means that what we learn about one is valid for the other.
//
// It is fine to have a bunch of runtime assertions in an iterator
// constructor, because their cost will be amortized across all iterations.
assert_eq!(start.u.shape(), start.v.shape());
assert_eq!(start.u.shape(), end.u.shape());
assert_eq!(start.u.shape(), end.v.shape());
assert_eq!(start.u.strides(), start.v.strides());
assert_eq!(start.u.strides(), end.u.strides());
assert_eq!(start.u.strides(), end.v.strides());
// Collect and check common layout information
let in_shape = start.simd_shape();
assert!(in_shape.into_iter().min().unwrap() >= 2);
let strides = start.u.strides();
assert_eq!(strides.len(), 2);
assert!(strides.iter().all(|stride| *stride > 0));
let [row_stride, col_stride] = [strides[0] as usize, strides[1] as usize];
assert_eq!(col_stride, 1);
// Select the center of the simulation domain
let out_shape = in_shape.map(|dim| dim - 2);
let out_slice = s![1..=out_shape[0], 1..out_shape[1]];
let mut out_u = end.u.slice_mut(out_slice);
let mut out_v = end.v.slice_mut(out_slice);
assert_eq!(start.u.strides(), out_u.strides());
assert_eq!(start.u.strides(), out_v.strides());
let [out_rows, out_cols] = out_shape;
// Determine how many elements we must skip in order to go from the
// past-the-end element of one row to the first element of the next row.
let next_row_step = row_stride - out_cols;
// Prepare a way to access input windows and output refs by output position
// The safety of the closures below is actually asserted on the caller's
// side, but sadly unsafe closures aren't a thing in Rust yet.
let stencil_shape = [STENCIL_WEIGHTS.len(), STENCIL_WEIGHTS[0].len()];
let window_shape = (stencil_shape[0], stencil_shape[1]).strides((row_stride, 1));
let unchecked_output = move |out_ptr: *mut Vector<SIMD_WIDTH>| unsafe { &mut *out_ptr };
let unchecked_input_window = move |in_ptr: *const Vector<SIMD_WIDTH>| unsafe {
ArrayView2::from_shape_ptr(window_shape, in_ptr)
};
// Recipe to emit the currently selected input windows and output references,
// then move to the next column. As before, this is only safe if called with
// correct element pointers.
let emit_and_increment =
move |in_u_ptr: &mut *const Vector<SIMD_WIDTH>,
in_v_ptr: &mut *const Vector<SIMD_WIDTH>,
out_u_ptr: &mut *mut Vector<SIMD_WIDTH>,
out_v_ptr: &mut *mut Vector<SIMD_WIDTH>| unsafe {
let win_u = unchecked_input_window(*in_u_ptr);
let win_v = unchecked_input_window(*in_v_ptr);
let out_u = unchecked_output(*out_u_ptr);
let out_v = unchecked_output(*out_v_ptr);
*in_u_ptr = in_u_ptr.add(1);
*in_v_ptr = in_v_ptr.add(1);
*out_u_ptr = out_u_ptr.add(1);
*out_v_ptr = out_v_ptr.add(1);
(win_u, win_v, out_u, out_v)
};
// Set up iteration state
let mut in_u_ptr = start.u.as_ptr();
let mut in_v_ptr = start.v.as_ptr();
let mut out_u_ptr = out_u.as_mut_ptr();
let mut out_v_ptr = out_v.as_mut_ptr();
//
// End of the current row processed by out_v_ptr
let mut out_v_row_end = unsafe { out_v_ptr.add(out_cols) };
//
// End of the last row of the output grid
let out_v_end = unsafe { out_v_row_end.add(out_rows.saturating_sub(1) * row_stride) };
// Emit output iterator
std::iter::from_fn(move || {
// Common case : we are within the bounds of a row and advance normally
if out_v_ptr < out_v_row_end {
return Some(emit_and_increment(
&mut in_u_ptr,
&mut in_v_ptr,
&mut out_u_ptr,
&mut out_v_ptr,
));
}
// Otherwise, check if we reached the end of iteration
if out_v_ptr == out_v_end {
return None;
}
// We're at the end of a row, but not at the end of iteration:
// switch to the next row then emit the next element as usual
debug_assert_eq!(out_v_ptr, out_v_row_end);
unsafe {
in_u_ptr = in_u_ptr.add(next_row_step);
in_v_ptr = in_v_ptr.add(next_row_step);
out_u_ptr = out_u_ptr.add(next_row_step);
out_v_ptr = out_v_ptr.add(next_row_step);
out_v_row_end = out_v_ptr.add(out_cols);
}
Some(emit_and_increment(
&mut in_u_ptr,
&mut in_v_ptr,
&mut out_u_ptr,
&mut out_v_ptr,
))
})
}We do not have the time to cover how it works in detail, but in a nutshell, it
is the same code that the iterator zip in our optimized SIMD implementation
should compile down to, and unlike the iterator zip, we wrote it and therefore
can put a hard-earned #[inline] directive on it.
Exercise
Integrate these two iterator inlining optimizations into your code, and measure their effect on runtime performance. It should now be more in line (heh heh) with what you would expect considering the work that was put into SIMD layout improvements in the last chapter.
There is a lesson to be learned here: when an optimization does not have the payoff that you would expect, do not conclude that it is bad right away. Instead, take the time to figure out what’s going on, and whether your optimization is truly working as intended.
It is not always possible to inline function calls due to annoying edge cases like recursion.
This is why language and compiler authors should really get their act
together and complement function-level inlining directives with more
flexible call site inlining directives. But to the author’s knowledge,
only clang has provided a basic matching C extension to this day. Here
are some possible reasons why:
- Compiler optimizer codebases tend to be very messy and understaffed, and extending them with a new optimization hint can take an unexpected amount of refactoring work.
- At the programming language level, designing good syntax for annotating individual function calls is not as easy as it seems, because modern programming languages feature many constructs that call functions but do not look like function calls, including any kind of operator overloading. And there are other interesting programming language design questions concerning how you would hint about transitive inlining beyond one directly annotated function call.
We do not want you to accidentally DDoS some poor open source maintainers with hundreds of issues and pull requests and wait for them to sort through the duplicate reports during the entire school.
There is a reason why sane compilers do not inline all function calls by default. Inlining means duplicating compilation work, which will have consequences in terms of compilation time and RAM consumption. It increases code size, which can cause I-cache problems at runtime. And by making caller functions too large, it can trigger other optimizer heuristics that tune down the amount of optimizations that is performed on the caller function. Basically, inlining is a tradeoff: it is very useful in the right place, but it can easily do more harm than good in the wrong place. Which is why it is very annoying that most compilers and programming languages only provide callee-side inlining hints at this point in time.
FMA vs ILP
If you paid close attention during the first part of this course, you may have been thinking for a while now that there is some code in the Gray-Scott computation that looks like a perfect candidate for introducing fused multiply-add CPU instructions.
More specifically, if we look at an iteration of the update loop…
// Access the SIMD data corresponding to the center concentration
let u = win_u[STENCIL_OFFSET];
let v = win_v[STENCIL_OFFSET];
// Compute the diffusion gradient for U and V
let [full_u, full_v] = (win_u.rows().into_iter())
.zip(win_v.rows())
.zip(STENCIL_WEIGHTS)
.flat_map(|((u_row, v_row), weights_row)| {
(u_row.into_iter().copied())
.zip(v_row.into_iter().copied())
.zip(weights_row)
})
.fold(
[Vector::splat(0.); 2],
|[acc_u, acc_v], ((stencil_u, stencil_v), weight)| {
let weight = Vector::splat(weight);
[
acc_u + weight * (stencil_u - u),
acc_v + weight * (stencil_v - v),
]
},
);
// Compute SIMD versions of all the float constants that we use
let diffusion_rate_u = Vector::splat(DIFFUSION_RATE_U);
let diffusion_rate_v = Vector::splat(DIFFUSION_RATE_V);
let feedrate = Vector::splat(opts.feedrate);
let killrate = Vector::splat(opts.killrate);
let deltat = Vector::splat(opts.deltat);
let ones = Vector::splat(1.0);
// Compute the output values of u and v
let uv_square = u * v * v;
let du = diffusion_rate_u * full_u - uv_square + feedrate * (ones - u);
let dv = diffusion_rate_v * full_v + uv_square - (feedrate + killrate) * v;
*out_u = u + du * deltat;
*out_v = v + dv * deltat;…we can see that the diffusion gradient’s fold() statement and the
computation of the output values of u and v are full of floating point
multiplications followed by additions.
It would surely seem sensible to replace these with fused multiply-add operations that compute multiplication-addition pairs 2x faster and more accurately at the same time!
Free lunch at last?
Enticed by the prospect of getting an easy 2x performance speedup at last, we proceed to rewrite all the code using fused multiply-add operations…
// We must bring this trait in scope in order to use mul_add()
use std::simd::StdFloat;
// Compute the diffusion gradient for U and V
let [full_u, full_v] = (win_u.rows().into_iter())
.zip(win_v.rows())
.zip(STENCIL_WEIGHTS)
.flat_map(|((u_row, v_row), weights_row)| {
(u_row.into_iter().copied())
.zip(v_row.into_iter().copied())
.zip(weights_row)
})
.fold(
[Vector::splat(0.); 2],
|[acc_u, acc_v], ((stencil_u, stencil_v), weight)| {
let weight = Vector::splat(weight);
[
// NEW: Introduced FMA here
(stencil_u - u).mul_add(weight, acc_u),
(stencil_v - v).mul_add(weight, acc_v),
]
},
);
// Compute SIMD versions of all the float constants that we use
let diffusion_rate_u = Vector::splat(DIFFUSION_RATE_U);
let diffusion_rate_v = Vector::splat(DIFFUSION_RATE_V);
let feedrate = Vector::splat(opts.feedrate);
let killrate = Vector::splat(opts.killrate);
let deltat = Vector::splat(opts.deltat);
let ones = Vector::splat(1.0);
// Compute the output values of u and v
// NEW: Introduced even more FMA there
let uv_square = u * v * v;
let du = diffusion_rate_u.mul_add(full_u, (ones - u).mul_add(feedrate, -uv_square));
let dv = diffusion_rate_v.mul_add(full_v, -(feedrate + killrate).mul_add(v, uv_square));
*out_u = du.mul_add(deltat, u);
*out_v = dv.mul_add(deltat, v);…and we run our microbenchmarks, full of hope…
simulate/16x16 time: [8.3555 µs 8.3567 µs 8.3580 µs]
thrpt: [30.629 Melem/s 30.634 Melem/s 30.638 Melem/s]
change:
time: [+731.23% +731.59% +731.89%] (p = 0.00 < 0.05)
thrpt: [-87.979% -87.975% -87.970%]
Performance has regressed.
Found 9 outliers among 100 measurements (9.00%)
6 (6.00%) high mild
3 (3.00%) high severe
simulate/64x64 time: [68.137 µs 68.167 µs 68.212 µs]
thrpt: [60.048 Melem/s 60.088 Melem/s 60.114 Melem/s]
change:
time: [+419.07% +419.96% +421.09%] (p = 0.00 < 0.05)
thrpt: [-80.809% -80.768% -80.735%]
Performance has regressed.
Found 4 outliers among 100 measurements (4.00%)
1 (1.00%) high mild
3 (3.00%) high severe
Benchmarking simulate/256x256: Warming up for 3.0000 s
Warning: Unable to complete 100 samples in 5.0s. You may wish to increase target time to 8.7s, enable flat sampling, or reduce sample count to 50.
simulate/256x256 time: [891.62 µs 891.76 µs 891.93 µs]
thrpt: [73.476 Melem/s 73.491 Melem/s 73.502 Melem/s]
change:
time: [+327.65% +329.35% +332.59%] (p = 0.00 < 0.05)
thrpt: [-76.883% -76.709% -76.616%]
Performance has regressed.
Found 10 outliers among 100 measurements (10.00%)
2 (2.00%) high mild
8 (8.00%) high severe
simulate/1024x1024 time: [10.769 ms 11.122 ms 11.489 ms]
thrpt: [91.266 Melem/s 94.276 Melem/s 97.370 Melem/s]
change:
time: [+34.918% +39.345% +44.512%] (p = 0.00 < 0.05)
thrpt: [-30.802% -28.236% -25.881%]
Performance has regressed.
Benchmarking simulate/4096x4096: Warming up for 3.0000 s
Warning: Unable to complete 100 samples in 5.0s. You may wish to increase target time to 6.9s, or reduce sample count to 70.
simulate/4096x4096 time: [71.169 ms 71.273 ms 71.376 ms]
thrpt: [235.05 Melem/s 235.39 Melem/s 235.74 Melem/s]
change:
time: [+0.1618% +0.4000% +0.6251%] (p = 0.00 < 0.05)
thrpt: [-0.6213% -0.3984% -0.1616%] Change within noise
threshold.
…but ultimately, we get nothing but disappointment and perplexity. What’s going on, and why does this attempt at optimization slow everything down to a crawl instead of speeding things up?
The devil in the details
Software performance optimization is in many ways like natural sciences: when experiment stubbornly refuses to agree with our theory, it is good to review our theoretical assumptions.
When we say that modern x86 hardware can compute an FMA for the same cost as a multiplication or an addition, what we actually mean is that hardware can compute two FMAs per cycle, much like it can compute two additions per cycle1 and two multiplications per cycle.
However, that statement comes with an “if” attached: our CPUs can only compute two FMAs per cycle if there is sufficient instruction-level parallelism in the code to keep the FMA units busy.
And it does not end there, those “if“s just keep piling up:
- FMAs have a higher latency than additions. Therefore it takes more instruction-level parallelism to hide that latency by excuting unrelated work while waiting for the results to come out. If you happen to be short on instruction-level parallelism, adding more FMAs will quickly make your program latency-bound, and thus slower.
- SIMD multiplication, addition and subtraction are quite flexible in terms of which registers or memory locations inputs can come from, which registers outputs can go to, and when negation can be applied. In contrast, because they have three operands, FMAs suffer from combinatorial explosion and end up with less supported patterns. It is therefore easier to end up in a situation where a single hardware FMA instruction cannot do the trick and you need more CPU instructions to do what looks like a single multiply + add/sub pattern in the code.
All this is to say, the hardware FMA implementations that we have today have mainly been designed to make CPUs score higher at LINPACK benchmarking contests, and achieved this goal with flying colors. As an unexpected bonus, it turns out that they may also prove useful when implementing several other very regular linear algebra and signal processing routines that do nothing but performing lots of independent FMAs in rapid succession. But for any kind of computation that exhibits a less trivial and regular pattern of floating point (add, mul) pairs, it may take serious work from your side to achieve the promised 2x speedup from the use of FMA instructions.
Take two
Keeping the above considerations in mind, we will start by scaling back our FMA ambitions, and only using FMAs in the initial part of the code that looks like a dot product.
The rationale for this is that the rest of the code is largely latency-bound, and irregular enough to hit FMA implementations corner cases. Therefore hardware FMA is unlikely to help there.
// Compute the diffusion gradient for U and V
let [full_u, full_v] = (win_u.rows().into_iter())
.zip(win_v.rows())
.zip(STENCIL_WEIGHTS)
.flat_map(|((u_row, v_row), weights_row)| {
(u_row.into_iter().copied())
.zip(v_row.into_iter().copied())
.zip(weights_row)
})
.fold(
[Vector::splat(0.); 2],
|[acc_u, acc_v], ((stencil_u, stencil_v), weight)| {
let weight = Vector::splat(weight);
[
// NEW: We keep the FMAs here...
(stencil_u - u).mul_add(weight, acc_u),
(stencil_v - v).mul_add(weight, acc_v),
]
},
);
// Compute SIMD versions of all the float constants that we use
let diffusion_rate_u = Vector::splat(DIFFUSION_RATE_U);
let diffusion_rate_v = Vector::splat(DIFFUSION_RATE_V);
let feedrate = Vector::splat(opts.feedrate);
let killrate = Vector::splat(opts.killrate);
let deltat = Vector::splat(opts.deltat);
let ones = Vector::splat(1.0);
// Compute the output values of u and v
// NEW: ...but we roll back the introduction of FMA there.
let uv_square = u * v * v;
let du = diffusion_rate_u * full_u - uv_square + feedrate * (ones - u);
let dv = diffusion_rate_v * full_v + uv_square - (feedrate + killrate) * v;
*out_u = u + du * deltat;
*out_v = v + dv * deltat;If we benchmark this new implementation against the FMA-less implementation, we get results that look a lot more reasonable already when compared to the previous chapter’s version:
simulate/16x16 time: [1.0638 µs 1.0640 µs 1.0642 µs]
thrpt: [240.55 Melem/s 240.60 Melem/s 240.65 Melem/s]
change:
time: [+5.5246% +5.5631% +5.5999%] (p = 0.00 < 0.05)
thrpt: [-5.3029% -5.2699% -5.2354%]
Performance has regressed.
Found 3 outliers among 100 measurements (3.00%)
2 (2.00%) high mild
1 (1.00%) high severe
simulate/64x64 time: [13.766 µs 13.769 µs 13.771 µs]
thrpt: [297.43 Melem/s 297.48 Melem/s 297.54 Melem/s]
change:
time: [+6.7803% +6.8418% +6.9153%] (p = 0.00 < 0.05)
thrpt: [-6.4680% -6.4037% -6.3498%]
Performance has regressed.
Found 7 outliers among 100 measurements (7.00%)
3 (3.00%) low mild
1 (1.00%) high mild
3 (3.00%) high severe
simulate/256x256 time: [218.72 µs 218.75 µs 218.78 µs]
thrpt: [299.55 Melem/s 299.60 Melem/s 299.63 Melem/s]
change:
time: [+5.9635% +5.9902% +6.0154%] (p = 0.00 < 0.05)
thrpt: [-5.6741% -5.6516% -5.6278%]
Performance has regressed.
Found 1 outliers among 100 measurements (1.00%)
1 (1.00%) high mild
simulate/1024x1024 time: [7.8361 ms 7.9408 ms 8.0456 ms]
thrpt: [130.33 Melem/s 132.05 Melem/s 133.81 Melem/s]
change:
time: [-0.3035% +1.6779% +3.6310%] (p = 0.09 > 0.05)
thrpt: [-3.5037% -1.6502% +0.3044%]
No change in performance detected.
Benchmarking simulate/4096x4096: Warming up for 3.0000 s
Warning: Unable to complete 100 samples in 5.0s. You may wish to increase target time to 6.9s, or reduce sample count to 70.
simulate/4096x4096 time: [70.898 ms 70.994 ms 71.088 ms]
thrpt: [236.01 Melem/s 236.32 Melem/s 236.64 Melem/s]
change:
time: [+2.5330% +2.7397% +2.9421%] (p = 0.00 < 0.05)
thrpt: [-2.8580% -2.6667% -2.4704%] Performance has
regressed.
That’s not a speedup yet, but at least it is not a massive slowdown anymore.
Breaking the (dependency) chain
The reason why our diffusion gradient computation did not get faster with FMAs
is that it features two long addition dependency chains, one for acc_u values
and one for acc_v values.
At each step of the original fold() reduction loop, if we consider the
computation of acc_u…
- There’s one
stencil_u - uthat can be computed as soon as inputstencil_uis available.2 - Then one multiplication by
weightwhich can only be done once that subtraction is done. - And there is one final accumulation which will need to wait until the result
of the multiplication is available AND the result of the previous
acc_ucomputation is ready.
…and acc_v plays a perfectly symmetrical role. But after introducing FMA, we
get this:
- As before, there’s one
stencil_u - uthat can be computed as soon as input is available. - And then there is one FMA operation that needs both the result of that
subtraction and the result of the previous
acc_ucomputation.
Overall, we execute less CPU instructions per loop iteration. But we also
lengthened the dependency chain for acc_u because the FMA that computes it has
higher latency. Ultimately, the two effects almost cancel each other out, and we
get performance that is close, but slightly worse.
Can we break this acc_u dependency chain and speed things up by introducing
extra instruction-level parallelism, as we did before when summing
floating-point numbers? We sure can try!
However, it is important to realize that we must do it with care, because introducing more ILP increases our code’s SIMD register consumption, and we’re already putting the 16 available x86 SIMD registers under quite a bit of pressure.
Indeed, in an ideal world, any quantity that remains constant across update loop iterations would remain resident in a CPU register. But in our current code, this includes…
- All the useful stencil element values (which, after compiler optimizer
deduplication and removal of zero computations, yields one register full of
copies of the
0.5constant and another full of copies of the0.25constant). - Splatted versions of all 5 simulation parameters
diffusion_rate_u,diffusion_rate_v,feedrate,killrateanddeltat. - One register full of
1.0s, matching our variableones. - And most likely one register full of
0.0, because one of these almost always comes up in SIMD computations. To the point where many non-x86 CPUs optimize for it by providing a fake register from which reads always return 0.
This means that in the ideal world where all constants can be kept resident in registers, we already have 9 SIMD registers eaten up by those registers, and only have 7 registers left for the computation proper. In addition, for each loop iteration, we also need at a bare minimum…
- 2 registers for holding the center values of u and v.
- 2 registers for successively holding
stencil_u,stencil_u - uand(stencil_u - u) * weightbefore accumulation, along with the v equivalent. - 2 registers for holding the current values of
acc_uandacc_v.
So all in all, we only have 1 CPU register left for nontrivial purposes before we start spilling our constants back to memory. Which means that introducing significant ILP (in the form of two new accumulators and input values) will necessarily come at the expense at spilling constants to memory and needing to reload them from memory later on. The question then becomes: are the benefits of ILP worth this expense?
Experiment time
Well, there is only one way to find out. First we try to introduce two-way ILP3…
// Compute SIMD versions of the stencil weights
let stencil_weights = STENCIL_WEIGHTS.map(|row| row.map(Vector::splat));
// Compute the diffusion gradient for U and V
let mut full_u_1 = (win_u[[0, 0]] - u) * stencil_weights[0][0];
let mut full_v_1 = (win_v[[0, 0]] - v) * stencil_weights[0][0];
let mut full_u_2 = (win_u[[0, 1]] - u) * stencil_weights[0][1];
let mut full_v_2 = (win_v[[0, 1]] - v) * stencil_weights[0][1];
full_u_1 = (win_u[[0, 2]] - u).mul_add(stencil_weights[0][2], full_u_1);
full_v_1 = (win_v[[0, 2]] - v).mul_add(stencil_weights[0][2], full_v_1);
full_u_2 = (win_u[[1, 0]] - u).mul_add(stencil_weights[1][0], full_u_2);
full_v_2 = (win_v[[1, 0]] - v).mul_add(stencil_weights[1][0], full_v_2);
assert_eq!(STENCIL_WEIGHTS[1][1], 0.0); // <- Will be optimized out
full_u_1 = (win_u[[1, 2]] - u).mul_add(stencil_weights[1][2], full_u_1);
full_v_1 = (win_v[[1, 2]] - v).mul_add(stencil_weights[1][2], full_v_1);
full_u_2 = (win_u[[2, 0]] - u).mul_add(stencil_weights[2][0], full_u_2);
full_v_2 = (win_v[[2, 0]] - v).mul_add(stencil_weights[2][0], full_v_2);
full_u_1 = (win_u[[2, 1]] - u).mul_add(stencil_weights[2][1], full_u_1);
full_v_1 = (win_v[[2, 1]] - v).mul_add(stencil_weights[2][1], full_v_1);
full_u_2 = (win_u[[2, 2]] - u).mul_add(stencil_weights[2][2], full_u_2);
full_v_2 = (win_v[[2, 2]] - v).mul_add(stencil_weights[2][2], full_v_2);
let full_u = full_u_1 + full_u_2;
let full_v = full_v_1 + full_v_2;…and we observe that it is indeed quite a significant benefit for this computation:
simulate/16x16 time: [452.35 ns 452.69 ns 453.13 ns]
thrpt: [564.96 Melem/s 565.51 Melem/s 565.94 Melem/s]
change:
time: [-57.479% -57.442% -57.399%] (p = 0.00 < 0.05)
thrpt: [+134.73% +134.97% +135.18%]
Performance has improved.
Found 8 outliers among 100 measurements (8.00%)
1 (1.00%) high mild
7 (7.00%) high severe
simulate/64x64 time: [4.0774 µs 4.0832 µs 4.0952 µs]
thrpt: [1.0002 Gelem/s 1.0031 Gelem/s 1.0046 Gelem/s]
change:
time: [-70.417% -70.388% -70.352%] (p = 0.00 < 0.05)
thrpt: [+237.29% +237.70% +238.03%]
Performance has improved.
Found 6 outliers among 100 measurements (6.00%)
1 (1.00%) low mild
2 (2.00%) high mild
3 (3.00%) high severe
simulate/256x256 time: [59.714 µs 59.746 µs 59.791 µs]
thrpt: [1.0961 Gelem/s 1.0969 Gelem/s 1.0975 Gelem/s]
change:
time: [-72.713% -72.703% -72.691%] (p = 0.00 < 0.05)
thrpt: [+266.18% +266.35% +266.47%]
Performance has improved.
Found 16 outliers among 100 measurements (16.00%)
4 (4.00%) low mild
3 (3.00%) high mild
9 (9.00%) high severe
simulate/1024x1024 time: [7.0386 ms 7.1614 ms 7.2842 ms]
thrpt: [143.95 Melem/s 146.42 Melem/s 148.98 Melem/s]
change:
time: [-11.745% -9.8149% -7.9159%] (p = 0.00 < 0.05)
thrpt: [+8.5963% +10.883% +13.308%]
Performance has improved.
simulate/4096x4096 time: [37.029 ms 37.125 ms 37.219 ms]
thrpt: [450.78 Melem/s 451.91 Melem/s 453.08 Melem/s]
change:
time: [-47.861% -47.707% -47.557%] (p = 0.00 < 0.05)
thrpt: [+90.684% +91.229% +91.797%]
Performance has improved.
Encouraged by this first success, we try to go for 4-way ILP…
let mut full_u_1 = (win_u[[0, 0]] - u) * stencil_weights[0][0];
let mut full_v_1 = (win_v[[0, 0]] - v) * stencil_weights[0][0];
let mut full_u_2 = (win_u[[0, 1]] - u) * stencil_weights[0][1];
let mut full_v_2 = (win_v[[0, 1]] - v) * stencil_weights[0][1];
let mut full_u_3 = (win_u[[0, 2]] - u) * stencil_weights[0][2];
let mut full_v_3 = (win_v[[0, 2]] - v) * stencil_weights[0][2];
let mut full_u_4 = (win_u[[1, 0]] - u) * stencil_weights[1][0];
let mut full_v_4 = (win_v[[1, 0]] - v) * stencil_weights[1][0];
assert_eq!(STENCIL_WEIGHTS[1][1], 0.0);
full_u_1 = (win_u[[1, 2]] - u).mul_add(stencil_weights[1][2], full_u_1);
full_v_1 = (win_v[[1, 2]] - v).mul_add(stencil_weights[1][2], full_v_1);
full_u_2 = (win_u[[2, 0]] - u).mul_add(stencil_weights[2][0], full_u_2);
full_v_2 = (win_v[[2, 0]] - v).mul_add(stencil_weights[2][0], full_v_2);
full_u_3 = (win_u[[2, 1]] - u).mul_add(stencil_weights[2][1], full_u_3);
full_v_3 = (win_v[[2, 1]] - v).mul_add(stencil_weights[2][1], full_v_3);
full_u_4 = (win_u[[2, 2]] - u).mul_add(stencil_weights[2][2], full_u_4);
full_v_4 = (win_v[[2, 2]] - v).mul_add(stencil_weights[2][2], full_v_4);
let full_u = (full_u_1 + full_u_2) + (full_u_3 + full_u_4);
let full_v = (full_v_1 + full_v_2) + (full_v_3 + full_v_4);…and it does not change much anymore on the Intel i9-10900 CPU that I’m testing on here, although I can tell you that it still gives ~10% speedups on my AMD Zen 3 CPUs at home.4
simulate/16x16 time: [450.29 ns 450.40 ns 450.58 ns]
thrpt: [568.16 Melem/s 568.38 Melem/s 568.52 Melem/s]
change:
time: [-0.6248% -0.4375% -0.2013%] (p = 0.00 < 0.05)
thrpt: [+0.2017% +0.4394% +0.6287%]
Change within noise threshold.
Found 7 outliers among 100 measurements (7.00%)
4 (4.00%) high mild
3 (3.00%) high severe
simulate/64x64 time: [4.0228 µs 4.0230 µs 4.0231 µs]
thrpt: [1.0181 Gelem/s 1.0182 Gelem/s 1.0182 Gelem/s]
change:
time: [-1.4861% -1.3761% -1.3101%] (p = 0.00 < 0.05)
thrpt: [+1.3275% +1.3953% +1.5085%]
Performance has improved.
Found 9 outliers among 100 measurements (9.00%)
2 (2.00%) low severe
4 (4.00%) low mild
1 (1.00%) high mild
2 (2.00%) high severe
simulate/256x256 time: [60.567 µs 60.574 µs 60.586 µs]
thrpt: [1.0817 Gelem/s 1.0819 Gelem/s 1.0820 Gelem/s]
change:
time: [+1.3650% +1.4165% +1.4534%] (p = 0.00 < 0.05)
thrpt: [-1.4326% -1.3967% -1.3467%]
Performance has regressed.
Found 15 outliers among 100 measurements (15.00%)
1 (1.00%) low severe
1 (1.00%) low mild
3 (3.00%) high mild
10 (10.00%) high severe
simulate/1024x1024 time: [6.8775 ms 6.9998 ms 7.1208 ms]
thrpt: [147.26 Melem/s 149.80 Melem/s 152.47 Melem/s]
change:
time: [-4.5709% -2.2561% +0.0922%] (p = 0.07 > 0.05)
thrpt: [-0.0921% +2.3082% +4.7898%]
No change in performance detected.
simulate/4096x4096 time: [36.398 ms 36.517 ms 36.641 ms]
thrpt: [457.88 Melem/s 459.44 Melem/s 460.94 Melem/s]
change:
time: [-2.0551% -1.6388% -1.2452%] (p = 0.00 < 0.05)
thrpt: [+1.2609% +1.6661% +2.0982%]
Performance has improved.
Found 1 outliers among 100 measurements (1.00%)
1 (1.00%) high mild
Finally, we can try to implement maximal 8-way ILP…
let full_u_1 = (win_u[[0, 0]] - u) * stencil_weights[0][0];
let full_v_1 = (win_v[[0, 0]] - v) * stencil_weights[0][0];
let full_u_2 = (win_u[[0, 1]] - u) * stencil_weights[0][1];
let full_v_2 = (win_v[[0, 1]] - v) * stencil_weights[0][1];
let full_u_3 = (win_u[[0, 2]] - u) * stencil_weights[0][2];
let full_v_3 = (win_v[[0, 2]] - v) * stencil_weights[0][2];
let full_u_4 = (win_u[[1, 0]] - u) * stencil_weights[1][0];
let full_v_4 = (win_v[[1, 0]] - v) * stencil_weights[1][0];
assert_eq!(STENCIL_WEIGHTS[1][1], 0.0);
let full_u_5 = (win_u[[1, 2]] - u) * stencil_weights[1][2];
let full_v_5 = (win_v[[1, 2]] - v) * stencil_weights[1][2];
let full_u_6 = (win_u[[2, 0]] - u) * stencil_weights[2][0];
let full_v_6 = (win_v[[2, 0]] - v) * stencil_weights[2][0];
let full_u_7 = (win_u[[2, 1]] - u) * stencil_weights[2][1];
let full_v_7 = (win_v[[2, 1]] - v) * stencil_weights[2][1];
let full_u_8 = (win_u[[2, 2]] - u) * stencil_weights[2][2];
let full_v_8 = (win_v[[2, 2]] - v) * stencil_weights[2][2];
let full_u = ((full_u_1 + full_u_2) + (full_u_3 + full_u_4))
+ ((full_u_5 + full_u_6) + (full_u_7 + full_u_8));
let full_v = ((full_v_1 + full_v_2) + (full_v_3 + full_v_4))
+ ((full_v_5 + full_v_6) + (full_v_7 + full_v_8));…and it is undisputably slower:
simulate/16x16 time: [486.03 ns 486.09 ns 486.16 ns]
thrpt: [526.58 Melem/s 526.65 Melem/s 526.72 Melem/s]
change:
time: [+7.6024% +7.8488% +7.9938%] (p = 0.00 < 0.05)
thrpt: [-7.4021% -7.2776% -7.0653%]
Performance has regressed.
Found 18 outliers among 100 measurements (18.00%)
16 (16.00%) high mild
2 (2.00%) high severe
simulate/64x64 time: [4.6472 µs 4.6493 µs 4.6519 µs]
thrpt: [880.51 Melem/s 881.00 Melem/s 881.38 Melem/s]
change:
time: [+15.496% +15.546% +15.598%] (p = 0.00 < 0.05)
thrpt: [-13.494% -13.454% -13.417%]
Performance has regressed.
Found 7 outliers among 100 measurements (7.00%)
2 (2.00%) high mild
5 (5.00%) high severe
simulate/256x256 time: [68.774 µs 68.923 µs 69.098 µs]
thrpt: [948.45 Melem/s 950.86 Melem/s 952.91 Melem/s]
change:
time: [+13.449% +13.563% +13.710%] (p = 0.00 < 0.05)
thrpt: [-12.057% -11.943% -11.854%]
Performance has regressed.
Found 21 outliers among 100 measurements (21.00%)
1 (1.00%) low mild
4 (4.00%) high mild
16 (16.00%) high severe
simulate/1024x1024 time: [7.0141 ms 7.1438 ms 7.2741 ms]
thrpt: [144.15 Melem/s 146.78 Melem/s 149.50 Melem/s]
change:
time: [-0.2910% +2.0563% +4.6567%] (p = 0.12 > 0.05)
thrpt: [-4.4495% -2.0149% +0.2918%]
No change in performance detected.
simulate/4096x4096 time: [38.128 ms 38.543 ms 38.981 ms]
thrpt: [430.39 Melem/s 435.29 Melem/s 440.03 Melem/s]
change:
time: [+4.2543% +5.5486% +6.7916%] (p = 0.00 < 0.05)
thrpt: [-6.3597% -5.2569% -4.0807%]
Performance has regressed.
Found 1 outliers among 100 measurements (1.00%)
1 (1.00%) high mild
This should not surprise you: at this point, we have fully lost the performance benefits of fused multiply-add, and we use so many registers for our inputs and accumulators that the compiler will need to generate a great number of constant spills and reloads in order to fit the computation into the 16 microarchitectural x86 SIMD registers.
All in all, for this computation, the 4-way ILP version can be declared our performance winner.
Exercise
The astute reader will have noticed that we cannot compare between FMA and multiply-add sequences yet because we have only implemented ILP optimizations in the FMA-based code, not the original code based on non fused multiply-add sequences.
Please assess the true performance benefits of FMAs on this computation by
starting from the 4-way ILP FMA version and replacing all mul_adds with
multiply-add sequences, then comparing the benchmark results in both cases.
Find the results interesting? We will get back to them in the next chapter.
Yes, I know about those newer Intel CPU cores that have a third adder. Thanks Intel, that was a great move! Now wake me up when these chips are anywhere near widespread in computing centers.
The astute reader will have noticed that we can actually get rid of this subtraction by changing the center weight of the stencil. As this optimization does not involve any new Rust or HPC concept, it is not super interesting in the context of this course, so in the interest of time we leave it as an exercise to the reader. But if you’re feeling lazy and prefer to read code than write it, it has been applied to the reference implementation.
Must use the traditional duplicated code ILP style here because
iterator_ilp cannot implement the optimization of ignoring the zero
stencil value at the center, which is critical to performance here.
This is not surprising because AMD Zen CPUs have more independent floating-point ALUs than most Intel CPUs, and thus it takes more instruction-level parallelism to saturate their execution backend.
Cache blocking
If we run our latest version through perf stat -d, we will see that above a
certain problem size, it seems to be slowed down by memory access issues:
$ perf stat -d -- cargo bench --bench simulate -- --profile-time=10 1024x
Finished `bench` profile [optimized + debuginfo] target(s) in 0.05s
Running benches/simulate.rs (target/release/deps/simulate-f304f2306d63383e)
Gnuplot not found, using plotters backend
Benchmarking simulate/1024x1024: Complete (Analysis Disabled)
Performance counter stats for 'cargo bench --bench simulate -- --profile-time=10 1024x':
15 457,63 msec task-clock # 1,000 CPUs utilized
45 context-switches # 2,911 /sec
0 cpu-migrations # 0,000 /sec
16 173 page-faults # 1,046 K/sec
66 043 605 917 cycles # 4,273 GHz (50,05%)
32 277 621 790 instructions # 0,49 insn per cycle (62,55%)
1 590 473 709 branches # 102,892 M/sec (62,56%)
4 078 658 branch-misses # 0,26% of all branches (62,52%)
6 694 606 694 L1-dcache-loads # 433,094 M/sec (62,50%)
1 395 491 611 L1-dcache-load-misses # 20,85% of all L1-dcache accesses (62,46%)
197 653 531 LLC-loads # 12,787 M/sec (49,97%)
2 226 645 LLC-load-misses # 1,13% of all LL-cache accesses (50,01%)
15,458909585 seconds time elapsed
15,411864000 seconds user
0,047092000 seconds sys
Indeed, 20% of our data accesses miss the L1 data cache, and possibly as a result, the CPU only executes one SIMD instruction every two clock cycles. Can we improve upon this somehow?
Visualizing the problem
Recall that our memory access pattern during iteration looks like the following schematic, where the outer blue-colored square represents SIMD vectors that are being read and the inner red-colored square represents SIMD vectors that are being written:

There is, however, a more hardware-centered way to study this pattern, which is to investigate which SIMD vectors must be brought into the L1 CPU cache at each step of the computation, and which SIMD vectors can be reused from previous steps.
For simplicity, we will draw our schematics as if cache lines did not exist and CPUs truly loaded or stored one single SIMD vector whenever we ask them to do so.
In the case of input data, the pattern looks like this, where pink represents data that is newly brought into the CPU cache, and green represents data that can be reused from previous iterations:
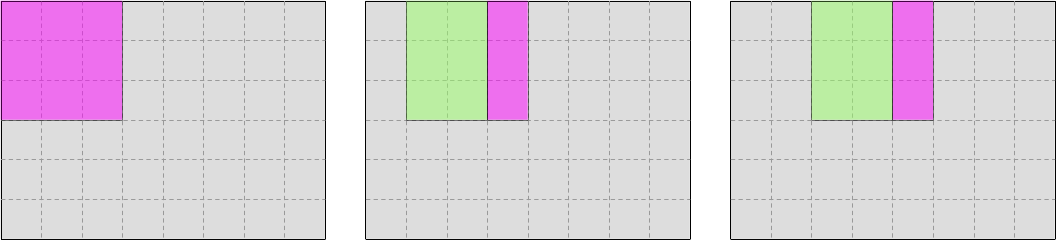
And in the case of output data, the pattern looks like this:
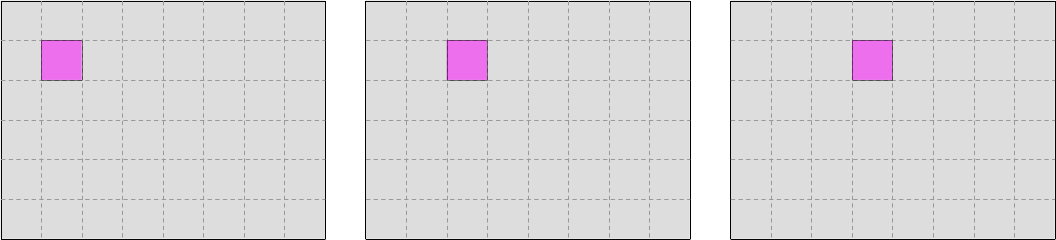
So far so good. As long as we are generating the first row of output data, there is no way to improve upon this pattern. The CPU cache is working as intended, speeding up at least 2/3 of our memory accesses, and it actually helps even more than this when more advanced cache features like hardware prefetching are taken into account.
The question is, what will happen when we reach the second row of output data? Can we reuse the data that we loaded when processing the first row of data, like this?
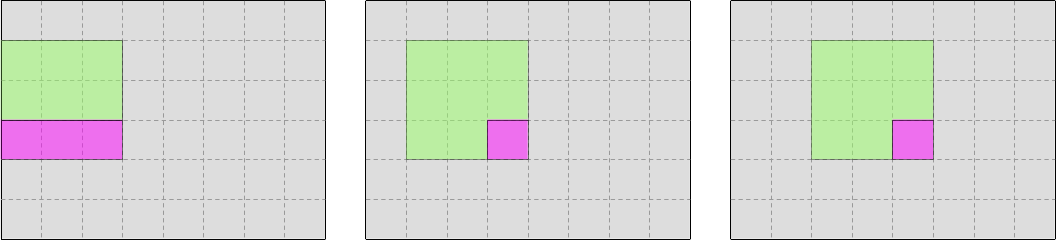
Or do we need to load everything again from RAM or a lower-level cache, like this?
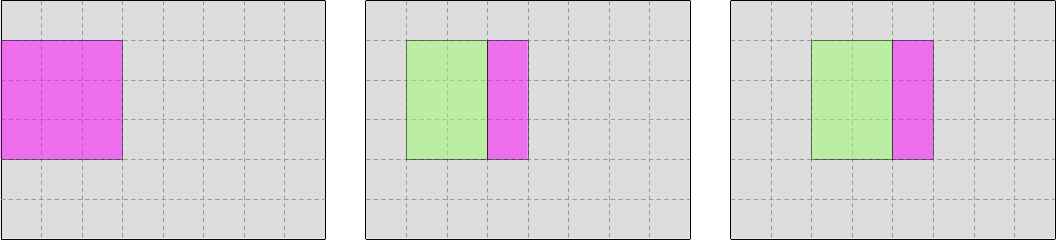
The answer to this question actually depends on how many columns our simulation domain has:
- If the simulation domain has few columns, then by the time we start processing the second row of output, the input data will still be fresh in the L1 CPU cache and can efficiently be reused.
- But if the simulation domain has many columns, by the time we get to the second row, the input data from the beginning of the first row will have been silently dropped by the L1 CPU cache, and we will need to slowly reload it from RAM or a lower-level CPU cache.
We can estimate where the limit lies using relatively simple math:
- Let use denote
Sthe size of the L1 CPU cache in bytes andCthe width of the simulation domain in scalar columns. - In our optimized SIMD data layout, rows of data are padded by 1 SIMD vector of
zeros on both sides, so we actually have
K = C + 2 * Wscalar data columns in our internal tables, whereWis our SIMD vector width. - To produce a row of output, we must read
3 * Kdata points from the two input tables representing the starting concentrations of species U and V, and we must writeK - 2 * W = Cdata points to the two matching output tables. - Each data point is a number of type
Float, which is currently configured to be of typef32. Therefore, aFloatis currently 4 bytes. - So overall, the CPU cache footprint that is associated while reading input for
an entire row is
2 * (3 * K) * 4 = 24 * Kbytes and the CPU cache footprint that is associated with writing output for an entire row is2 * C * 4 = 8 * Cbytes. - By combining these two expressions, it follows that the total CPU cache
footprint associated with producing one row of output is
24 * K + 8 * Cbytes. Which, if we inject the value ofKinto the expression, translates into32 * C + 48 * Wbytes. - For optimal performance, we would like all this data to fit in L1 cache, so
that input data is still accessible by the time we start processing the second
row, knowing that we need some headroom for other things that go into the L1
cache like constant data. So overall we would like to have
32 * C + 48 * W < S. - And because we are actually interested in the maximal value of
C, we rewrite this expression into the mathematically equivalentC < (S - 48 * W) / 32.
By injecting concrete values of S and W into this expression, we get a
maximal value of C for which a given CPU can operate at optimal L1 cache
efficiency.
For example, if we consider an Intel i9-10900 CPU with 32 KiB of L1d cache and 256-bit AVX vectors, the limit of L1d cache capacity is reached when the simulation domain has around 976 columns (not accounting for other data which must fit in L1d cache). And unsurprisingly, this does indeed match the point where our microbenchmark’s performance drops.
So far so good, we have a theoretical model that is good enough to model the issue. Let us now use it to improve L1 cache hit rates at larger problem sizes!
The loop blocking trick
So far, we have used a simple iteration scheme where we fully iterate over each row of output concentrations, before moving to the next one:
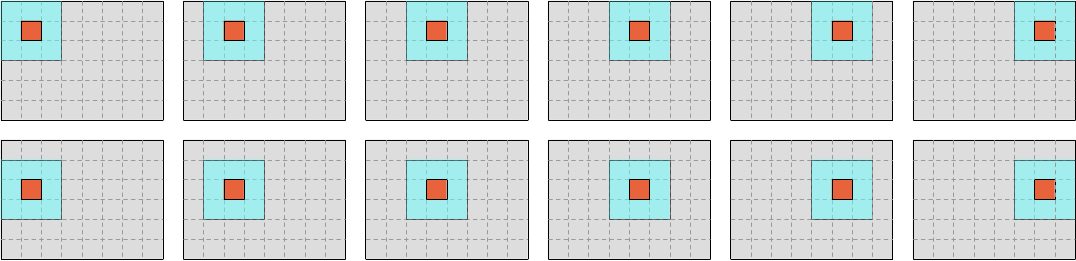
It doesn’t have to be that way however. We could use a different scheme where we slice our data into a number of vertical blocks, and iterate over each vertical block before moving to the next one.
For example, we could first iterate over the left half of the data like this…
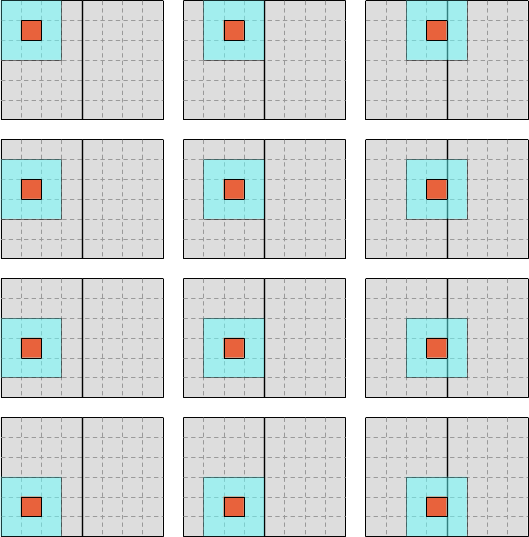
…and then iterate over the right half like this:
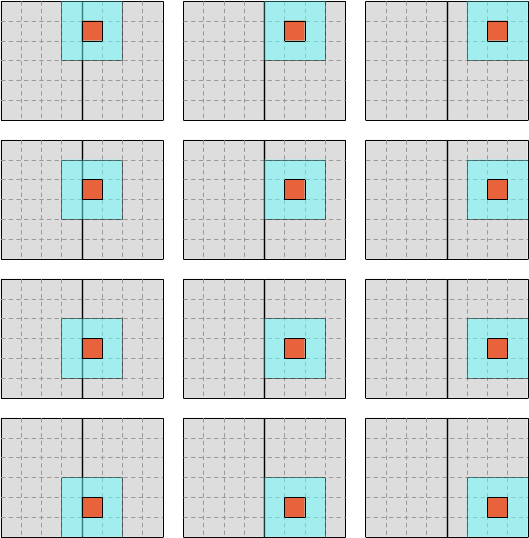
The computation is not sensitive to the order in which data points are computed, so this change of iteration order will not affect the results. What it will do, however, is to reduce the number of columns that are traversed before the computation moves to the next line, ideally ensuring that a large computation which did not fully leverage the CPU’s L1 cache before is now able to do so.
How wide should the blocks be? Well, there is a trade-off there. On one hand, CPUs work best when they are processing long, uninterrupted sequences of contiguous data, and from this perspective longer rows of data are better. On the other hand, the whole point of this chapter is to show you that long row lengths can be problematic for L1d cache locality. Taken together, these two statements entail that we should strive to make our blocks should as wide as available L1d cache capacity will allow, but no wider.
Which is where the simple theoretical model that we derived previously comes into play: using it, we will be able to determine how wide blocks could ideally be, assuming that the L1d cache were fully available for simulation data. We will then shrink this estimate using an empirically tuned safety factor in order to leave some L1d cache headroom for other program state (like constants) and CPU memory subsystem black magic like prefetches. And this is how we will get our optimal block width.
Determining the block width
Recall that our simple theoretical model gives us an C < (S - 48 * W) / 32
bound on block width, where S is the size of the L1d cache and W is our SIMD
vector width. We already have seen how one can query the SIMD vector width. But
where are we supposed to find out how large the L1d cache is, given that it
depends on your CPU, and sometimes even on the core where you are executing?1
In a C program, the easiest way to query the cache layout of your CPU would be
to use the excellent hwloc
library, which abstracts over hardware and OS specifics and gives you an easy
and portable way to query CPU topology information. But since we are doing Rust,
using hwloc directly will involve some unpleasant and unidiomatic unsafe
constructs.
Therefore, my recommendation will instead be for you to use
hwlocality, a safe binding
that I wrote on top of hwloc in order to make it easier to use from Rust.
We start by adding it to our project via a now familiar procedure…2
cargo add hwlocality
And then, inside of our code, we can easily use it to find the minimum L1d cache size across all available CPU cores:
use hwlocality::Topology;
let topology = Topology::new().expect("Failed to query hwloc topology");
let cache_stats = topology
.cpu_cache_stats()
.expect("Failed to probe CPU cache stats");
let l1d_size = cache_stats.smallest_data_cache_sizes()[0];From this, we can deduce an upper bound on the optimal block width…
let l1d_size = smallest_l1d_cache_size();
let float_size = std::mem::size_of::<Float>();
let max_scalar_block_width = (l1d_size as usize - 12 * float_size * simd_width) / (8 * float_size);…convert it to a number of SIMD vectors to account for our actual data layout…
let max_simd_block_width = max_scalar_block_width / simd_width;…and shrink it down by a safety factor (that we will late tune through microbenchmarking) in order to account for other uses of the L1d cache that our simple theoretical model does not cover:
// FIXME: Adjust this safety factor through microbenchmarking
let ideal_simd_block_width = (max_simd_block_width as f32 * 0.8) as usizePutting it all together, we get this function:
/// Determine the optimal block size of the computation
pub fn simd_cols_per_block(simd_width: usize) -> usize {
let topology = Topology::new().expect("Failed to query hwloc topology");
let cache_stats = topology
.cpu_cache_stats()
.expect("Failed to probe CPU cache stats");
let l1d_size = cache_stats.smallest_data_cache_sizes()[0];
let float_size = std::mem::size_of::<Float>();
let max_scalar_block_width =
(l1d_size as usize - 12 * float_size * simd_width) / (8 * float_size);
let max_simd_block_width = max_scalar_block_width / simd_width;
// FIXME: Adjust this safety factor through microbenchmarking
(max_simd_block_width as f32 * 0.8) as usize
}One thing to bear in mind here is that although the code may look innocent
enough, computing the block size involves some relatively expensive operations
like querying the CPU’s memory subsystem topology from the OS. So we should not
do it on every call to the update() function. Instead, it should be computed
once during simulation initialization and kept around across update() calls.
Block-wise iteration
Now that we have a block size, let’s slice up our computation domain into actual blocks.
We start by adding a parameter to our update method so that the caller can pass in the precalculated chunk size.
pub fn update<const SIMD_WIDTH: usize>(
opts: &UpdateOptions,
start: &UV<SIMD_WIDTH>,
end: &mut UV<SIMD_WIDTH>,
cols_per_block: usize, // <- This is new
) where
LaneCount<SIMD_WIDTH>: SupportedLaneCount,
{
// TODO: Implementation
}Then we extract the center of the output array and we slice it up into non-overlapping chunks:
use ndarray::Axis;
let center_shape = end.simd_shape().map(|dim| dim - 2);
let center = s![1..=center_shape[0], 1..=center_shape[1]];
let mut end_u_center = end.u.slice_mut(center);
let mut end_v_center = end.v.slice_mut(center);
let end_u = end_u_center.axis_chunks_iter_mut(Axis(1), cols_per_block);
let end_v = end_v_center.axis_chunks_iter_mut(Axis(1), cols_per_block);So far, ndarray makes life easy for us. But unfortunately, it does not have an
axis iterator that matches the semantics that we have for input windows, and
therefore we are going to need to hack it using careful indexing.
We start by iterating over output blocks, using enumerate() and a counter of
blocks to tell when we are going to reach the last block (which may be narrower
than the other blocks)..
let num_blocks = center_shape[1].div_ceil(cols_per_block);
for (idx, (end_u, end_v)) in end_u.zip(end_v).enumerate() {
let is_last = idx == (num_blocks - 1);
// TODO: Process one output block here
}…and then we slice up input blocks of the right size:
use ndarray::Slice;
let input_base = idx * cols_per_block;
let input_slice = if is_last {
Slice::from(input_base..)
} else {
Slice::from(input_base..input_base + cols_per_block + 2)
};
let start_u = start.u.slice_axis(Axis(1), input_slice);
let start_v = start.v.slice_axis(Axis(1), input_slice);At this point, we have correctly sized start_u, start_v, end_u and end_v
blocks. But our stencil_iter() function cannot accept them yet because the
code has so far been specialized to take full UV structs as input, and cannot
handle chunks of the simulation domain yet.
I will spare you the required code adjustments since the fine art of
generalizing unsafe Rust code without compromizing its safety is beyond
the scope of this short course. But in the end we get this:
use ndarray::ArrayViewMut2;
#[inline]
pub fn stencil_iter<'data, const SIMD_WIDTH: usize>(
start_u: ArrayView2<'data, Vector<SIMD_WIDTH>>,
start_v: ArrayView2<'data, Vector<SIMD_WIDTH>>,
mut end_u_center: ArrayViewMut2<'data, Vector<SIMD_WIDTH>>,
mut end_v_center: ArrayViewMut2<'data, Vector<SIMD_WIDTH>>,
) -> impl Iterator<
Item = (
ArrayView2<'data, Vector<SIMD_WIDTH>>, // <- Input u window
ArrayView2<'data, Vector<SIMD_WIDTH>>, // <- Input v window
&'data mut Vector<SIMD_WIDTH>, // <- Output u
&'data mut Vector<SIMD_WIDTH>, // <- Output v
),
>
where
LaneCount<SIMD_WIDTH>: SupportedLaneCount,
{
// Assert that the sub-grids all have the expected memory layout.
assert_eq!(start_u.shape(), start_v.shape());
assert_eq!(end_u_center.shape(), end_v_center.shape());
assert_eq!(start_u.shape().len(), 2);
assert_eq!(end_u_center.shape().len(), 2);
assert!(start_u
.shape()
.iter()
.zip(end_u_center.shape())
.all(|(start_dim, end_dim)| *start_dim == end_dim + 2));
assert_eq!(start_u.strides(), start_v.strides());
assert_eq!(start_u.strides(), end_u_center.strides());
assert_eq!(start_u.strides(), end_v_center.strides());
// Collect and check common layout information
let in_shape = [start_u.shape()[0], start_u.shape()[1]];
assert!(in_shape.into_iter().min().unwrap() >= 2);
let strides = start_u.strides();
assert_eq!(strides.len(), 2);
assert!(strides.iter().all(|stride| *stride > 0));
let [row_stride, col_stride] = [strides[0] as usize, strides[1] as usize];
assert_eq!(col_stride, 1);
let [out_rows, out_cols] = in_shape.map(|dim| dim - 2);
// Determine how many elements we must skip in order to go from the
// past-the-end element of one row to the first element of the next row.
let next_row_step = row_stride - out_cols;
// Prepare a way to access input windows and output refs by output position
// The safety of the closures below is actually asserted on the caller's
// side, but sadly unsafe closures aren't a thing in Rust yet.
let stencil_shape = [STENCIL_WEIGHTS.len(), STENCIL_WEIGHTS[0].len()];
let window_shape = (stencil_shape[0], stencil_shape[1]).strides((row_stride, 1));
let unchecked_output = move |out_ptr: *mut Vector<SIMD_WIDTH>| unsafe { &mut *out_ptr };
let unchecked_input_window = move |in_ptr: *const Vector<SIMD_WIDTH>| unsafe {
ArrayView2::from_shape_ptr(window_shape, in_ptr)
};
// Recipe to emit the currently selected input windows and output references,
// then move to the next column. As before, this is only safe if called with
// correct element pointers.
let emit_and_increment =
move |in_u_ptr: &mut *const Vector<SIMD_WIDTH>,
in_v_ptr: &mut *const Vector<SIMD_WIDTH>,
out_u_ptr: &mut *mut Vector<SIMD_WIDTH>,
out_v_ptr: &mut *mut Vector<SIMD_WIDTH>| unsafe {
let win_u = unchecked_input_window(*in_u_ptr);
let win_v = unchecked_input_window(*in_v_ptr);
let out_u = unchecked_output(*out_u_ptr);
let out_v = unchecked_output(*out_v_ptr);
*in_u_ptr = in_u_ptr.add(1);
*in_v_ptr = in_v_ptr.add(1);
*out_u_ptr = out_u_ptr.add(1);
*out_v_ptr = out_v_ptr.add(1);
(win_u, win_v, out_u, out_v)
};
// Set up iteration state
let mut in_u_ptr = start_u.as_ptr();
let mut in_v_ptr = start_v.as_ptr();
let mut out_u_ptr = end_u_center.as_mut_ptr();
let mut out_v_ptr = end_v_center.as_mut_ptr();
//
// End of the current row processed by out_v_ptr
let mut out_v_row_end = unsafe { out_v_ptr.add(out_cols) };
//
// End of the last row of the output grid
let out_v_end = unsafe { out_v_row_end.add(out_rows.saturating_sub(1) * row_stride) };
// Emit output iterator
std::iter::from_fn(move || {
// Common case : we are within the bounds of a row and advance normally
if out_v_ptr < out_v_row_end {
return Some(emit_and_increment(
&mut in_u_ptr,
&mut in_v_ptr,
&mut out_u_ptr,
&mut out_v_ptr,
));
}
// Otherwise, check if we reached the end of iteration
if out_v_ptr == out_v_end {
return None;
}
// We're at the end of a row, but not at the end of iteration:
// switch to the next row then emit the next element as usual
debug_assert_eq!(out_v_ptr, out_v_row_end);
unsafe {
in_u_ptr = in_u_ptr.add(next_row_step);
in_v_ptr = in_v_ptr.add(next_row_step);
out_u_ptr = out_u_ptr.add(next_row_step);
out_v_ptr = out_v_ptr.add(next_row_step);
out_v_row_end = out_v_ptr.add(out_cols);
}
Some(emit_and_increment(
&mut in_u_ptr,
&mut in_v_ptr,
&mut out_u_ptr,
&mut out_v_ptr,
))
})
}Basically, where we used to slice the center of the output ourselves, the caller is now responsible for doing it, and the rest is similar as slicing an N-d array does not affect the memory stride from one row to the next, which is the main low-level layout information that we rely on here.
Exercise
Integrate this loop blocking optimization into the code. Note that this will
require some changes to the run_simulation function.
Then microbenchmark the code, and adjust the security factor in the
implementation of simd_cols_per_block to see how it affects
performance. The results may surprise you!3
As seen in power efficiency focused CPUs like Arm big.LITTLE and Intel Adler Lake.
Before it works, however, you will need to also ensure that your Linux
distribution’s equivalent of Ubuntu and Debian’s libhwloc-dev package is
installed. Unfortunately, C dependency management is not quite at the same
level of convenience as Rust’s cargo add…
…and in fact, I am still suspicious of them myself, and would like to spend more time analyzing them later on. Something for a future edition of this school?
Parallelism
Well, that last chapter was a disappointment. All this refactoring work, only to
find out in the final microbenchmark that the optimization we implemented does
improve L1d cache hit rate (as can be measured using perf stat -d), but this
improvement in this CPU utilization efficiency metric does not translate into an
improvement in execution speed.
The reason is not clear to me at this point in time, unfortunately. It could be several things:
- The CPU manages to hide the latency of L1d cache misses by executing other pending instructions. So even at a 20% L1d cache miss rate we are still not memory-bound.
- The optimization is somehow not implemented properly and costs more than it helps. I have checked for absence of simple issues here, but there could be more subtle ones around.
- There is another, currently unknown factor preventing the execution of more instructions per cycles. So even if data is more readily available in the L1d cache, we still can’t use it yet.
Hopefully I will find the time to clarify this before the next edition of this school. But for now, let us move to the last optimization that should be performed once we are convinced that we are using a single CPU core as efficiently as we can, namely using all of our other CPU cores.
Another layer of loop blocking
There is an old saying that almost every problem in programming can be resolved by adding another layer of indirection. However it could just as well be argued that almost every problem in software performance optimization can be resolved by adding another layer of loop blocking.
In this particular case, the loop blocking that we are going to add revolves around slicing our simulation domain into independent chunks that can be processed by different CPU cores for parallelism. Which begs the question: in which direction should all those chunks be cut? Across rows or columns? And how big should they be?
Let’s start with the first question. We are using ndarray, which in its
default configuration stores data in row-major order. And we also know that CPUs
are very fond of iterating across data in long linear patterns, and will make
you pay a hefty price for any sort of jump across the underlying memory buffer.
Therefore, we should think twice before implementing any sort of chunking that
makes the rows that we are iterating over shorter, which means that chunking the
data into blocks of rows for parallelization is a better move.
As for how big the chunks should be, it is basically a balance between two factors:
- Exposing more opportunities for parallelism and load balancing by cutting
smaller chunks. This pushes us towards cutting the problem into at least
Nchunks where N is the number of CPU cores that our system has, and preferably more to allow for dynamic load balancing of tasks between CPU cores when some cores process work slower than others.1 - Amortizing the overhead of spawning and awaiting parallel work by cutting larger chunks. This pushes us towards cutting the problem into chunks no smaller than a certain size, dictated by processing speed and task spawning and joining overhead.
The rayon library can take care of the first concern for us by dynamically
splitting work as many times as necessary to achieve good load balancing on the
specific hardware and system that we’re dealing with at runtime. But as we have
seen before, it is not good at enforcing sequential processing cutoffs. Hence we
will be taking that matter into our own hands.
Configuring the minimal block size
In the last chapter, we have been using a hardcoded safety factor to pick the number of columns in each block, and you could hopefully see during the exercises that this made the safety factor unpleasant to tune. This chapter will thus introduce you to the superior approach of making the tuning parameters adjustable via CLI parameters and environment variables.
clap makes this very easy. First we enable the environment variable feature…
cargo add --features=env clap
…we add the appropriate option to our UpdateOptions struct…
#[derive(Debug, Args)]
pub struct UpdateOptions {
// ... unchanged existing options ...
/// Minimal number of data points processed by a parallel task
#[arg(env, long, default_value_t = 100)]
pub min_elems_per_parallel_task: usize,
}That’s it. Now if we either pass the --min-elems-per-parallel-task option to
the simulate binary or set the MIN_ELEMS_PER_PARALLEL_TASK environment
variable, that can be used as our sequential processing granularity in the code
that we are going to write next.
Adding parallelism
We then begin our parallelism journey by enabling the rayon support of the
ndarray crate. This enables some ndarray
producers to be
turned into Rayon parallel iterators.
cargo add --features=rayon ndarray
Next we split our update() function into two:
- One top-level
update()function that will be in charge of receiving user parameters, extracting the center of the output arrays, and parallelizing the work if deemed worthwhile. - One inner
update_seq()function that will do most of the work that we did before, but using array windows instead of manipulating the full concentration arrays directly.
Overall, it looks like this:
/// Parallel simulation update function
pub fn update<const SIMD_WIDTH: usize>(
opts: &UpdateOptions,
start: &UV<SIMD_WIDTH>,
end: &mut UV<SIMD_WIDTH>,
cols_per_block: usize,
) where
LaneCount<SIMD_WIDTH>: SupportedLaneCount,
{
// Extract the center of the output domain
let center_shape = end.simd_shape().map(|dim| dim - 2);
let center = s![1..=center_shape[0], 1..=center_shape[1]];
let mut end_u_center = end.u.slice_mut(center);
let mut end_v_center = end.v.slice_mut(center);
// Translate the element-based sequential iteration granularity into a
// row-based granularity.
let min_rows_per_task = opts
.min_elems_per_parallel_task
.div_ceil(end_u_center.ncols() * SIMD_WIDTH);
// Run the sequential simulation
if end_u_center.nrows() > min_rows_per_task {
// TODO: Run the simulation in parallel
} else {
// Run the simulation sequentially
update_seq(
opts,
start.u.view(),
start.v.view(),
end_u_center,
end_v_center,
cols_per_block,
);
}
}
/// Sequential update on a subset of the simulation domain
#[multiversion(targets("x86_64+avx2+fma", "x86_64+avx", "x86_64+sse2"))]
pub fn update_seq<const SIMD_WIDTH: usize>(
opts: &UpdateOptions,
start_u: ArrayView2<'_, Vector<SIMD_WIDTH>>,
start_v: ArrayView2<'_, Vector<SIMD_WIDTH>>,
mut end_u: ArrayViewMut2<'_, Vector<SIMD_WIDTH>>,
mut end_v: ArrayViewMut2<'_, Vector<SIMD_WIDTH>>,
cols_per_block: usize,
) where
LaneCount<SIMD_WIDTH>: SupportedLaneCount,
{
// Slice the output domain into vertical blocks for L1d cache locality
let num_blocks = end_u.ncols().div_ceil(cols_per_block);
let end_u = end_u.axis_chunks_iter_mut(Axis(1), cols_per_block);
let end_v = end_v.axis_chunks_iter_mut(Axis(1), cols_per_block);
// Iterate over output blocks
for (block_idx, (end_u, end_v)) in end_u.zip(end_v).enumerate() {
let is_last = block_idx == (num_blocks - 1);
// Slice up input blocks of the right width
let input_base = block_idx * cols_per_block;
let input_slice = if is_last {
Slice::from(input_base..)
} else {
Slice::from(input_base..input_base + cols_per_block + 2)
};
let start_u = start_u.slice_axis(Axis(1), input_slice);
let start_v = start_v.slice_axis(Axis(1), input_slice);
// Process current input and output blocks
for (win_u, win_v, out_u, out_v) in stencil_iter(start_u, start_v, end_u, end_v) {
// TODO: Same code as before
}
}
}Once this is done, parallelizing the loop becomes a simple matter of implementing loop blocking as we did before, but across rows, and iterating over the blocks using Rayon parallel iterators instead of sequential iterators:
// Bring Rayon parallel iteration in scope
use rayon::prelude::*;
// Slice the output domain into horizontal blocks for parallelism
let end_u = end_u_center.axis_chunks_iter_mut(Axis(0), min_rows_per_task);
let end_v = end_v_center.axis_chunks_iter_mut(Axis(0), min_rows_per_task);
// Iterate over parallel tasks
let num_tasks = center_shape[0].div_ceil(min_rows_per_task);
end_u
.into_par_iter()
.zip(end_v)
.enumerate()
.for_each(|(task_idx, (end_u, end_v))| {
let is_last_task = task_idx == (num_tasks - 1);
// Slice up input blocks of the right height
let input_base = task_idx * min_rows_per_task;
let input_slice = if is_last_task {
Slice::from(input_base..)
} else {
Slice::from(input_base..input_base + min_rows_per_task + 2)
};
let start_u = start.u.slice_axis(Axis(0), input_slice);
let start_v = start.v.slice_axis(Axis(0), input_slice);
// Process the current block sequentially
update_seq(opts, start_u, start_v, end_u, end_v, cols_per_block);
});Exercise
Integrate these changes into your codebase, then adjust the available tuning parameters for optimal runtime performance:
- First, adjust the number of threads that
rayonuses via theRAYON_NUM_THREADSenvironment variable. If the machine that you are running on has hyper-threading enabled, it is almost always a bad idea to use it on performance-optimized code, so using half the number of system-reported CPUs will already provide a nice speedup. And sincerayonis not NUMA-aware yet, using more threads than the number of cores in one NUMA domain (which you can query usinglscpu) may not be worthwhile. - Next, try to tune the
MIN_ELEMS_PER_PARALLEL_TASKparameter. Runtime performance is not very sensitive to this parameter, so you will want to start with big adjustments by factors of 10x more or 10x less, then fine-tune with smaller adjustements once you find a region of the parameter space that seems optimal. Finally, adjust the defaults to your tuned value.
And with that, if we ignore the small wrinkle of cache blocking not yet working in the manner where we would expect it to work (which indicates that there is a bug in either our cache blocking implementation or our expectation of its impact), we have taken Gray-Scott reaction computation performance as far as Rust will let us on CPU.
Stay tuned for next week’s session, where we will see how we to run the computation on a GPU!
Load balancing becomes vital for performance as soon as your system has CPU cores of heterogeneous processing capabilities like Arm’s big.LITTLE, Intel’s Adler Lake, and any CPU that has per-core turbo frequencies. But even on systems with homogeneous CPU core processing capabilities, load imbalance can dynamically occur as a result of e.g. interrupts from some specific hardware being exclusively processed by one specific CPU core. Therefore designing your program to allow for some amount of load balancing is a good idea as long as the associated task spawning and joining work does not cost you too much.
From zero to device
In the previous chapters, we have seen how to use Rust to implement an efficient CPU-based simulation of the Gray-Scott reaction. However, these days, CPUs are only half of the story, as most computers also come equipped with at least one GPU.
Originally designed for the low-dimensional linear algebra workloads of real-time computer graphics, GPUs have since been remarketed as general-purpose computing hardware, and successfully sold in large numbers to high performance computing centers worldwide. As a result, if you intend to run your computations on HPC centers, you need to know that being able to use a compute node’s GPUs is increasingly becoming a mandatory requirement for larger computing resource allocations.
But even if you don’t care about HPC centers, it is still good to know how to use a GPU for compute, as it is not uncommon for other people to run your code on gaming- or CAD-oriented hardware that has around 10x more single-precision1 floating-point computing power and RAM bandwidth on the GPU side than on the CPU side.
Therefore, in this part of the course, we will learn how Rust code can be made to leverage almost any available GPU (not just NVidia ones), with minimal end user installation requirements and good portability across operating systems, by leveraging the Vulkan API.
Being fair about Vulkan complexity
Like most other APIs designed by the Khronos Group, Vulkan has a reputation of being very verbose, requiring hundreds of lines of code in order to perform the simplest tasks. While that statement is not wrong, it is arguably incomplete and misleading:
- Vulkan is specified as a C API. This is necessary for it to be callable from
many programming languages, but due to limitations of its type system, C tends
to make patterns like resource managements and optional features verbose. This
is why it is a good idea to avoid using C APIs directly, and instead prefer
higher-level wrappers that leverage the extra capabilities of modern
programming languages for ergonomics, like
vulkanoin Rust. - While a Vulkan “Hello world” is indeed quite long, much of it revolves around one-time initialization work that would not need to be repeated in a larger application. As a consequence, less trivial Vulkan programs will be more comparable in size to programs written against other APIs that have a less flexible initialization process.
- Many lines of the typical Vulkan “Hello world” revolve around things that will not vary much across applications, like enumerating available computing devices and finding out which device you want to use. With a bit of care, these patterns can be easily extracted into libraries of common abstractions, that you can easily reuse from one application to another.
- Once all this “accidental verbosity” is taken care of, what remains is extra configuration steps that let you control more details of the execution of your application than is possible in other APIs. This control can be leveraged for performance optimizations, enabling well-written Vulkan applications to use the GPU more efficiently than e.g. CUDA or SYCL applications could.
Keeping these facts in mind, and balancing them against the need to fit this course in half a day, this Vulkan course will mimick the CPU course by providing you with lots of pre-written boilerplate code upfront, and heavily guiding you through the remaining work.
As before, we will spend the next few sections explaining how the provided code works. But because Vulkan programming is a fair bit more complex than CPU programming, here it will actually take not just a few sections, but a few chapters.
Adding the vulkano dependency
First of all, we add vulkano to our list of dependencies. This is a
high-level Vulkan binding that will take care of providing an idiomatic Rust
interface to the Vulkan C API, and also provide us with a good default policy
for handling particularly unpleasant aspects of Vulkan like functionality
enumeration2, GPU buffer sub-allocation3 and pipeline barriers4.
We use the now familiar cargo add command for this…
cargo add --optional vulkano
…but this time we make vulkano an optional dependency, which is not built by
default, so that your CPU builds are not affected by this relatively heavy
dependency.
We then add this dependency to a gpu optional feature inside of the project’s
Cargo.toml file:
[features]
gpu = ["dep:vulkano"]
This way, when the project is build with the --features=gpu cargo option,
vulkano will be built and linked against our project.
This means that all of our GPU code will more generally need to be guarded so that it is only compiled when this optional feature is enabled. We will later see how that is done.
Loading the Vulkan library
Now that we have vulkano in our dependency tree, we must make it load our
operating system’s Vulkan implementation. This is harder than it sounds on the
implementation side2, but vulkano makes it easy enough for us:
use vulkano::VulkanLibrary;
// Try to load the Vulkan library, and handle errors (here by propagating them)
let library = VulkanLibrary::new()?;We can then query the resulting
VulkanLibrary
object in order to know more about the Vulkan implementation that we are dealing
with:
- Which version of the Vulkan specification is supported?
- Are there optional extensions that we can enable? These enable us to do things like log driver error messages or display images on the screen.
- Are there optional layers that we can enable? These intercept each of our API calls, typically for the purpose of measuring profiles or validating that our usage of Vulkan is correct.
Creating an instance
Once we have learned everything that we need to know about the Vulkan
implementation of the host system, we proceed to create an
Instance.
This is where we actually initialize the Vulkan library by telling it more about
our application and what optional Vulkan functionality it needs.
For this purpose, and many others, vulkano uses a pattern of configuration
structs with a default value. You can use the defaults for most fields and set
the fields you want differently using the following syntax:
use vulkano::instance::InstanceExtensions;
// Let us log Vulkan errors and warnings
let enabled_extensions = InstanceExtensions {
ext_debug_utils: true,
..Default::default()
};By using this pattern on a larger scale, and leveraging cfg!(debug_assertions)
which lets us detect if the program is a debug or release build, we can set up a
Vulkan instance that enables minimal debug logging (errors and warnings) in
release builds, and more verbose logging in debug builds.
In debug builds, we also enable Vulkan’s validation layer, which instruments every API call to detect many flavors of invalid and inefficient API usage.
use vulkano::instance::{
Instance, InstanceCreateInfo, InstanceExtensions,
debug::{
DebugUtilsMessengerCallback, DebugUtilsMessengerCreateInfo,
DebugUtilsMessageSeverity, DebugUtilsMessageType
},
};
// Basic logging in release builds, more logging in debug builds
let mut message_severity =
DebugUtilsMessageSeverity::ERROR | DebugUtilsMessageSeverity::WARNING;
if cfg!(debug_assertions) {
message_severity |=
DebugUtilsMessageSeverity::INFO | DebugUtilsMessageSeverity::VERBOSE;
}
let mut message_type = DebugUtilsMessageType::GENERAL;
if cfg!(debug_assertions) {
message_type |=
DebugUtilsMessageType::VALIDATION | DebugUtilsMessageType::PERFORMANCE;
}
// Logging configuration and callback
let messenger_info = DebugUtilsMessengerCreateInfo {
message_severity,
message_type,
// This is unsafe because we promise not to call the Vulkan API
// inside of this callback
..unsafe {
DebugUtilsMessengerCreateInfo::user_callback(DebugUtilsMessengerCallback::new(
|severity, ty, data| {
eprintln!("[{severity:?} {ty:?}] {}", data.message);
},
))
}
};
// Set up a Vulkan instance
let instance = Instance::new(
library,
InstanceCreateInfo {
// Enable validation layers in debug builds to catch many Vulkan usage bugs
enabled_layers: if cfg!(debug_assertions) {
vec![String::from("VK_LAYER_KHRONOS_validation")]
} else {
Vec::new()
},
// Enable debug utils extension to let us log Vulkan messages
enabled_extensions: InstanceExtensions {
ext_debug_utils: true,
..Default::default()
},
// Set up a first debug utils messenger that logs Vulkan messages during
// instance initialization and teardown
debug_utils_messengers: vec![messenger_info],
..Default::default()
}
)?;Debug logging after instance creation
The debug_utils_messengers field of the InstanceCreateInfo struct only
affects how Vulkan errors and warnings are going to be logged during the
instance creation and teardown process. For reasons known to the Vulkan
specification authors alone, a separate
DebugUtilsMessenger must be configured in order to keep logging
messages while the application is running.
Of course, they can both use the same configuration, and we can refactor the
code accordingly. First we adjust the InstanceCreateInfo to clone the
messenger_info struct instead of moving it away…
debug_utils_messengers: vec![messenger_info.clone()],…and then we create our separate messenger, like this:
use vulkano::instance::debug::DebugUtilsMessenger;
let messenger = DebugUtilsMessenger::new(instance.clone(), messenger_info);Log messages will only be emitted as long as this object exists, so we will want
to keep it around along with other Vulkan state. We’ll get back to this by
eventually stashing all useful Vulkan state into a single VulkanContext
struct.
There is one more matter that we need to take care of, however: logging on
stderr is fundamentally incompatible with displaying ASCII art in the terminal,
like the indicatif progress bars that we have been using so far. If a log is
printed while the progress bar is on-screen, it will corrupt its display.
indicatif provides us with a tool to handle this, in the form of the
ProgressBar::suspend() method. But our debug utils messenger
must be configured to use it, which will not be needed in builds without
progress bars like our microbenchmarks.
To handle this concern, we pass down a callback to our instance creation function, which receives a string and is in charge of printing it to stderr as appropriate…
use std::{panic::RefUnwindSafe, sync::Arc};
use vulkano::{Validated, VulkanError};
fn create_instance(
// The various trait bounds are used to assert that it is fine for vulkano
// to move and use our debug callback anywhere, including on another thread
debug_println: impl Fn(String) + RefUnwindSafe + Send + Sync + 'static
) -> Result<(Arc<Instance>, DebugUtilsMessenger), Box<dyn Error>> {
// TODO: Create the instance and its debug messenger
}…and then we use it in our Vulkan logging callback instead of calling
eprintln!() directly:
..unsafe {
DebugUtilsMessengerCreateInfo::user_callback(DebugUtilsMessengerCallback::new(
move |severity, ty, data| {
let message = format!("[{severity:?} {ty:?}] {}", data.message);
debug_println(message);
},
))
}We will provide a version of this callback that directly sends logs to stderr…
#![allow(unused)] fn main() { pub fn debug_println_stderr(log: String) { eprintln!("{log}"); } }
…and a recipe to make other callbacks that use the suspend method of an
indicatif ProgressBar to correctly print out logs when such a progress bar is
active:
use indicatif::ProgressBar;
pub fn make_debug_println_indicatif(
progress_bar: ProgressBar
) -> impl Fn(String) + RefUnwindSafe + Send + Sync + 'static {
move |log| progress_bar.suspend(|| eprintln!("{log}"))
}To conclude this instance creation tour, let’s explain the return
type of create_instance():
Result<(Arc<Instance>, DebugUtilsMessenger), Box<dyn Error>>There are two layers there:
- We have a
Result, which indicates that the function may fail in a manner that the caller can recover from, or report in a customized fashion. - In case of success, we return an
Instance, wrapped in anArcAtomically Reference-Counted pointer so that cheap copies can be shared around, including across threads5. - In case of error, we return
Box<dyn Error>, which is the lazy person’s type for “any error can happen, I don’t care about enumerating them in the output type”.
And that’s finally it for Vulkan instance creation!
Picking a physical device
People who are used to CUDA or SYCL may be surprised to learn that Vulkan works on all modern6 GPUs with no other setup work needed than having a working OS driver, and can be easily emulated on CPU for purposes like unit testing in CI.
There is a flip side to this portability, however, which is that it is very common to have multiple Vulkan devices available on a given system, and production-grade code should ideally be able to…
- Tell which of the available devices (if any) match its hardware requirements (e.g. amount of RAM required for execution, desired Vulkan spec version/extensions…).
- If only a single device is to be used7, pick the most suitable device amongst those available options (which may involve various trade-offs like peak performance vs power efficiency).
We will at first do the simplest thing that should work on most machines8: accept all devices, priorize them by type (discrete GPU, integrated GPU, CPU-based emulation…) according to expected peak throughput, and pick the first device that matches in this priority order.
But as we move forward through the course, we may have to revisit this part of
the code by filtering out devices that do not implement certain optional
features that we need. Hence we should plan ahead by having a device filtering
callback that tells whether each device can be used or not, using the same logic
as
Iterator::filter().
Finally, we need to decide what will happen if we fail to detect a suitable GPU device. In production-quality code, the right thing to do here would be to log a warning and fall back to a CPU-based computation. And if we have such a CPU fallback available, we should probably also ignore CPU emulations of GPU devices, which are likely to be slower. But because the goal is to learn about how to write Vulkan code here, we will instead fail with a runtime panic when no GPU or GPU emulation is found, as this will tell us if something is wrong with our device selection callback.
Overall, our physical device selection code looks like this:
use vulkano::{
device::physical::{PhysicalDevice, PhysicalDeviceType},
VulkanError,
};
/// Pick the best physical device that matches our requirements
fn pick_physical_device(
instance: &Arc<Instance>,
mut device_filter: impl FnMut(&PhysicalDevice) -> bool,
) -> Result<Arc<PhysicalDevice>, VulkanError> {
Ok(instance
.enumerate_physical_devices()?
.filter(|device| device_filter(&device))
.fold(None, |best_so_far, current| {
// The first device that comes up is always the best
let Some(best_so_far) = best_so_far else {
return Some(current);
};
// Compare previous best device type to current device type
let best_device = match (
best_so_far.properties().device_type,
current.properties().device_type,
) {
// Discrete GPU should always be the best performing option
(PhysicalDeviceType::DiscreteGpu, _) => best_so_far,
(_, PhysicalDeviceType::DiscreteGpu) => current,
// Virtual GPU is hopefully a discrete GPU accessed via PCIe passthrough
(PhysicalDeviceType::VirtualGpu, _) => best_so_far,
(_, PhysicalDeviceType::VirtualGpu) => current,
// Integrated GPU is, at least, still a GPU.
// It will likely be less performant, but more power-efficient.
// In this basic codebase, we'll only care about performance.
(PhysicalDeviceType::IntegratedGpu, _) => best_so_far,
(_, PhysicalDeviceType::IntegratedGpu) => current,
// CPU emulation is probably going to be pretty bad...
(PhysicalDeviceType::Cpu, _) => best_so_far,
(_, PhysicalDeviceType::Cpu) => current,
// ...but at least we know what we're dealing with, unlike the rest
(PhysicalDeviceType::Other, _) => best_so_far,
(_, PhysicalDeviceType::Other) => current,
(_unknown, _other_unknown) => best_so_far,
};
Some(best_device)
})
// This part (and the function return type) would change if you wanted
// to switch to a CPU fallback when no GPU is found.
.expect("No usable Vulkan device found"))
}Creating a logical device and command queue
Once we have found a suitable physical device, we need to set up a logical device, which will be used to allocate resources. And we will also need to set up with one or more command queues, which will be used to submit work. Both of these will be created in a single API transaction.
The process of creating a logical device and associated command queues is very similar to that of creating a Vulkan instance, and exists partially for the same reasons: we need to pick which optional API features we want to enable, at the expense of reducing application portability.
But here there is also a new concern, which is command queue creation. In a nutshell, Vulkan devices support simultaneous submission and processing of commands over multiple independent hardware channels, which is typically used to…
- Overlap graphics rendering with general-purpose computing.
- Overlap PCIe data transfers to and from the GPU with other operations.
Some channels are specialized for a specific type of operations, and may perform
them better than other channels. Unlike most other GPU APIs, Vulkan exposes this
hardware feature in the form of queue families with flags that tell you what
each family can do. For example, here are the queue families available on my
laptop’s AMD Radeon 5600M GPU, as reported by vulkaninfo:
VkQueueFamilyProperties:
========================
queueProperties[0]:
-------------------
minImageTransferGranularity = (1,1,1)
queueCount = 1
queueFlags = QUEUE_GRAPHICS_BIT | QUEUE_COMPUTE_BIT | QUEUE_TRANSFER_BIT
timestampValidBits = 64
present support = true
VkQueueFamilyGlobalPriorityPropertiesKHR:
-----------------------------------------
priorityCount = 4
priorities: count = 4
QUEUE_GLOBAL_PRIORITY_LOW_KHR
QUEUE_GLOBAL_PRIORITY_MEDIUM_KHR
QUEUE_GLOBAL_PRIORITY_HIGH_KHR
QUEUE_GLOBAL_PRIORITY_REALTIME_KHR
queueProperties[1]:
-------------------
minImageTransferGranularity = (1,1,1)
queueCount = 4
queueFlags = QUEUE_COMPUTE_BIT | QUEUE_TRANSFER_BIT
timestampValidBits = 64
present support = true
VkQueueFamilyGlobalPriorityPropertiesKHR:
-----------------------------------------
priorityCount = 4
priorities: count = 4
QUEUE_GLOBAL_PRIORITY_LOW_KHR
QUEUE_GLOBAL_PRIORITY_MEDIUM_KHR
QUEUE_GLOBAL_PRIORITY_HIGH_KHR
QUEUE_GLOBAL_PRIORITY_REALTIME_KHR
queueProperties[2]:
-------------------
minImageTransferGranularity = (1,1,1)
queueCount = 1
queueFlags = QUEUE_SPARSE_BINDING_BIT
timestampValidBits = 64
present support = false
VkQueueFamilyGlobalPriorityPropertiesKHR:
-----------------------------------------
priorityCount = 4
priorities: count = 4
QUEUE_GLOBAL_PRIORITY_LOW_KHR
QUEUE_GLOBAL_PRIORITY_MEDIUM_KHR
QUEUE_GLOBAL_PRIORITY_HIGH_KHR
QUEUE_GLOBAL_PRIORITY_REALTIME_KHR
As you can see, there is one general-purpose queue family that can do everything, another queue family that is specialized for asynchronous compute tasks and data transfers running in parallel with the main compute/graphics work, and a third queue family that lets you manipulate sparse memory resources for the purpose of handling resources larger than GPU VRAM less badly.
From these physical queue families, you may then allocate one or more logical command queues that will allow you to submit commands to the matching hardware command processor.
To keep this introductory course simpler, and because the Gray-Scott reaction simulation does not easily lend itself to the parallel execution of compute and data transfer commands9, we will not use multiple command queues in the beginning. Instead, we will use a single command queue from the first queue family that supports general-purpose computations and data transfers:
use vulkano::device::QueueFlags;
// Pick the first queue family that supports compute
let queue_family_index = physical_device
.queue_family_properties()
.iter()
.position(|properties| {
properties
.queue_flags
.contains(QueueFlags::COMPUTE | QueueFlags::TRANSFER)
})
.expect("Vulkan spec mandates availability of at least one compute queue");As for optional device features, for now we will…
- Only enable features that are useful for debugging (basically turning out-of-bounds data access UB into well-defined behavior)
- Only do so in debug builds as they may come at a significant runtime performance cost.
- Only enable them if supported by the device, ignoring their absence otherwise.
Overall, it looks like this:
use vulkano::device::Features;
// Enable debug features in debug builds, if supported by the device
let supported_features = physical_device.supported_features();
let enabled_features = if cfg!(debug_assertions) {
Features {
robust_buffer_access: supported_features.robust_buffer_access,
robust_buffer_access2: supported_features.robust_buffer_access2,
robust_image_access: supported_features.robust_image_access,
robust_image_access2: supported_features.robust_image_access2,
..Default::default()
}
} else {
Features::default()
};Now that we know which optional features we want to enable and which command queues we want to use, all that is left to do is to create our logical device and single commande queue:
use vulkano::device::{Device, DeviceCreateInfo, QueueCreateInfo};
// Create our device and command queue
let (device, mut queues) = Device::new(
physical_device,
DeviceCreateInfo {
// Request a single command queue from the previously selected family
queue_create_infos: vec![QueueCreateInfo {
queue_family_index: queue_family_index as u32,
..Default::default()
}],
enabled_features,
..Default::default()
},
)?;
let queue = queues
.next()
.expect("We asked for one queue, we should get one");And that concludes our create_device_and_queue() function, which itself is the
last part of the basic application setup work that we will always need no matter
what we want to do with Vulkan.
In the next chapter, we will see a few more Vulkan setup steps that are a tiny bit more specific to this application, but could still be reused across many different applications.
It is not uncommon for GPUs to run double-precision computations >10x slower than single-precision ones.
Vulkan is an API that was designed to evolve over time and be freely extensible by hardware vendors. This means that the set of functions provided by your operating system’s Vulkan library is not fully known at compile time. Instead the list of available function pointers must be queried at runtime and absence of certain “newer” or “extended” function pointers must be correctly handled.
GPU memory allocators are very slow and come with all sorts of unpleasant limitations, like only allowing a small number of allocations or preventing any other GPU command from running in parallel with the allocator. Therefore, it is good practice to only allocate a few very large blocks of memory from the GPU driver, and use a separate library-based allocator like the Vulkan Memory Allocator in order to sub-allocate smaller application-requested buffers from these large blocks.
In Vulkan, GPUs are directed to do things using batches of commands. By default, these batches of commands are almost completely unordered, and it is legal for the GPU driver to e.g. start processing a command on a compute unit while the previous command is still running on another. Because of this and because GPUs hardware uses incoherent caches, the view of memory of two separate commands may be inconsistent, e.g. a command may not observe the writes to memory that were performed by a previous command in the batch. Pipeline barriers are a Vulkan-provided synchronization primitive that can be used to enforce execution ordering and memory consistency constraints between commands, at a runtime performance cost.
vulkano makes heavy use of Arc, which is the Rust equivalent of C++’s
shared_ptr. Unlike C++, Rust lets you choose between atomic and
non-atomic reference counting, in the form of Rc and Arc, so that you
do not need to pay the cost of atomic operations in single-threaded
sections of your code.
Vulkan 1.0 is supported by most GPUs starting around 2012-2013. The main exception is Apple GPUs. Due to lack of interest from Apple, who prefer to work on their proprietary Metal API, these GPUs can only support Vulkan via the MoltenVk library, which implements a “portability subset” of Vulkan that cuts off some minor features and thus does not meet the minimal requirements of Vulkan 1.0. Most Vulkan applications, however, will run just fine with the subset of Vulkan implemented by MoltenVk.
The barrier to using multiple devices is significantly lower in Vulkan than in most other GPU APIs, because they integrate very nicely into Vulkan’s synchronization model and can be manipulated together as “device groups” since Vulkan 1.1. But writing a correct multi-GPU application is still a fair amount of extra work, and many of us will not have access to a setup that allows them to check that their multi-GPU support actually works. Therefore, I will only cover usage of a single GPU during this course.
Most computers either have a single hardware GPU (discrete, virtual or integrated), a combination of a discrete and an integrated GPU, or multiple discrete GPUs of identical performance characteristics. Therefore, treating all devices of a single type as equal can only cause device selection problems in exotic configurations (e.g. machines mixing discrete GPUs from NVidia and AMD), and is thus normally an acceptable tradeoff in beginner-oriented Vulkan code. The best way to handle more exotic configurations is often not to auto-select GPUs anyway, but just to give the end user an option (via CLI parameters, environment or config files) to choose which GPU(s) should be used. If they are using such an unusual computer, they probably know enough about their hardware to make an informed choice here.
If we keep using the double-buffered design that has served us well so far, then as long as one GPU concentration buffer is in the process of being downloaded to the CPU, we can only run one computation step before needing to wait for that buffer to be available for writing, and that single overlapping compute step will not save us a lot of time. To do asynchronous downloads more efficiently, we would need to switch to a triple-buffered design, where an on-GPU copy of the current concentration array is first made to a third independent buffer that is not used for compute, and then the CPU download is performed from that buffer. But that adds a fair amount of complexity to the code, and is thus beyond the scope of this introductory course.
From device to context
At far as the Vulkan C API is concerned, once we have a device and a queue, we
can use pretty much every part of Vulkan. But on a more practical level, there
are some extra conveniences that we will want to set up now in order to make our
later work easier, and as a practical matter the vulkano high-level API forces
us to set up pretty much all of them anyway. These include…
- Sub-allocators, which let us perform fewer larger allocations from the GPU driver1, and slice them up into the small API objects that we need.
- Pipeline caches, which allow us not to recompile the GPU-side code when neither the code nor the GPU driver has changed. This makes our application run faster, because in GPU applications a large part of the GPU-side compilation work is done at runtime.
We will take care of this remaining vulkano initialization work in this
chapter.
Allocators
There are three kinds of objects that a Vulkan program may need to allocate in large numbers:
- Memory objects, like buffers and images. These will contain most of the application data that we are directly interested in processing.
- Command buffer objects. These are used to store batches of GPU commands, that will then be sent to the GPU in order to ask it to do something: transfer data, execute our GPU code…
- Descriptor set objects. These are used to attach a set of memory objects to a GPU program. The reason why Vulkan has them instead of making you bind memory objects to GPU programs one by one is that it allows the binding process to be more CPU-efficient, which matters in applications with short-running GPU programs that have many inputs and outputs.
These objects have very different characteristics (memory footprint, alignment,
lifetime, CPU-side access patterns…), and therefore benefit from each
having their own specialized allocation logic. Accordingly, vulkano provides
us with three standard allocators:
StandardMemoryAllocatorfor memory objectsStandardCommandBufferAllocatorfor command buffersStandardDescriptorSetAllocatorfor descriptor sets
As the Standard naming implies, these allocators are intended to be good
enough for most applications, and easily replaceable when they don’t fit. I can
tell you from experience that we are very unlikely to ever need to replace them
for our Gray-Scott simulation, so we can just have a couple of type aliases as a
minimal future proofing measure…
pub type MemoryAllocator = vulkano::memory::allocator::StandardMemoryAllocator;
pub type CommandBufferAllocator =
vulkano::command_buffer::allocator::StandardCommandBufferAllocator;
pub type DescriptorSetAllocator =
vulkano::descriptor_set::allocator::StandardDescriptorSetAllocator;…and a common initialization function that sets up all of them, using the default configuration as it fits the needs of the Gray-Scott simulation very well.
use std::sync::Arc;
use vulkano::{
command_buffer::allocator::StandardCommandBufferAllocatorCreateInfo,
descriptor_set::allocator::StandardDescriptorSetAllocatorCreateInfo,
};
fn create_allocators(
device: Arc<Device>,
) -> (
Arc<MemoryAllocator>,
Arc<CommandBufferAllocator>,
Arc<DescriptorSetAllocator>,
) {
let malloc = Arc::new(MemoryAllocator::new_default(device.clone()));
let calloc = Arc::new(CommandBufferAllocator::new(
device.clone(),
StandardCommandBufferAllocatorCreateInfo::default(),
));
let dalloc = Arc::new(DescriptorSetAllocator::new(
device.clone(),
StandardDescriptorSetAllocatorCreateInfo::default(),
));
(malloc, calloc, dalloc)
}You may reasonably wonder why we need to manually wrap the allocators in
an Arc atomically reference-counted smart pointer, when almost every other API
in vulkano returns an Arc for you. This bad API originates from the fact
that vulkano is currently reworking the API of its memory allocators, and had
to release v0.34 in the middle of that rework due to user pressure. So things
will hopefully improve in the next vulkano release.
Pipeline cache
Why it exists
GPU programs (also called shaders by graphics programmers and kernels by compute programmers) tend to have a more complex compilation process than CPU programs for a few reasons:
- At the time where you compile your application, you generally don’t know what GPU it is eventually going to run on. Needing to recompile the code anytime you want to run on a different GPU, either on the same multi-GPU machine or on a different machine, is a nuisance that many wise people would like to avoid.
- Compared to CPU manufacturers, GPU manufacturers are a lot less attached to the idea of having open ISA specifications. They would rather not fully disclose how their hardware ISA works, and instead only make you manipulate it through a lawyer-approved abstraction layer, that leaks less (presumed) trade secrets and allows them to transparently change more of their hardware architecture from one generation of hardware to the next.
- Because this abstraction layer is fully managed by the GPU driver, the translation of a given program in the fake manufacturer ISA to the actual hardware ISA is not fixed in time and can change from one version of the GPU driver to ther other, as new optimizations are discovered.
Because of this, ahead-of-time compilation of GPU code to the true hardware ISA pretty much does not exist. Instead, some degree of just-in-time compilation is always used. And with that comes the question of how much time you application can spend recompiling the GPU code on every run.
Vulkan approaches this problem from two angles:
- First of all, your GPU code is translated during application compilation into
an intermediate representation called SPIR-V, which is derived from LLVM IR.
The Vulkan implementation is then specified in terms of SPIR-V. This has
several advantages:
- Hardware vendors, who are not reknowned for their compilation expertise, do not need to manipulate higher-level languages anymore. Compared with earlier GPU APIs which trusted them at this task, this is a major improvement in GPU driver reliability.
- Some of the compilation and optimization work can be done at application compilation time. This reduces the amount of work that the GPU driver’s compiler needs to do at application runtime, and the variability of application performance across GPU drivers.
- Second, the result of translating the SPIR-V code to hardware-specific machine code can be saved into a cache and reused in later application runs. For reasons that will become clear later in this course, this cache is called a pipeline cache.
Now, one problem with caches is that they can be invalidated through changes in hardware or GPU driver versions. But Vulkan fully manages this part for you. What you need to handle is the work of saving this cache to disk when an application terminates, and reloading it on the next run of the application. Basically, you get a bunch of bytes from Vulkan, and Vulkan entrusts you for somehow saving those bytes somewhere and giving them back unchanged on the next application run.
The point of exposing this process to the application, instead of hiding it like earlier GPU APIs did, is that it gives advanced Vulkan applications power to…
- Invalidate the cache themselves when the Vulkan driver has a bug which leads to cache invalidation failure or corruption.2
- Provide pre-packaged caches for all common GPU drivers so that even the first run of an application is likely to be fast, without JiT compilation of GPU code.
How we handle it
In our case, we will not do anything fancy with the Vulkan pipeline cache, just mimick what other GPU APIs do under the hood by saving it in the operating system’s standard cache directory at application teardown time and loading it back if it exists at application startup time.
First of all, we need to know what the operating system’s standard cache directory location is. Annoyingly, it is very much non-obvious, changes from one OS to another, and varied across the history of each OS. But thankfully there’s a crate/library for that.
First we add it as an optional dependency…
cargo add --optional directories
…and within the project’s Cargo.toml, we make it part of our gpu
optional feature.
[features]
gpu = ["dep:directories", "dep:vulkano"]
We then use directories to locate the OS’ standard application data storage
directories:
use directories::ProjectsDirs;
let dirs = ProjectDirs::from("", "", "grayscott")
.expect("Could not find home directory");For this simple application, we handle weird OS configurations where the user’s
home directory cannot be found by panicking. A more sophisticated application
might decide instead not to cache GPU pipelines in this case, or even get
dangerous and try random hardcoded paths like /var/grayscott.cache just in
case they work out.
Finally, we use the computed directories to make a simple abstraction for cache persistence:
use std::path::PathBuf;
use vulkano::pipeline::cache::{PipelineCache, PipelineCacheCreateInfo};
/// Simple cache management abstraction
pub struct PersistentPipelineCache {
/// Standard OS data directories for this project: cache, config, etc
dirs: ProjectDirs,
/// Vulkan pipeline cache
pub cache: Arc<PipelineCache>,
}
//
impl PersistentPipelineCache {
/// Set up a pipeline cache, integrating previously cached data
fn new(device: Arc<Device>) -> Result<Self, Validated<VulkanError>> {
// Find standard OS directories
let dirs = ProjectDirs::from("", "", "grayscott")
.expect("Could not find home directory");
// Try to load former cache data, use empty data on vectors
let initial_data = std::fs::read(Self::cache_path(&dirs)).unwrap_or_default();
// Build Vulkan pipeline cache
//
// This is unsafe because we solemny promise to Vulkan that we did not
// fiddle with the bytes of the cache. And since this is GPU vendor
// code, you better not expect it to validate its inputs.
let cache = unsafe {
PipelineCache::new(
device,
PipelineCacheCreateInfo {
initial_data,
..Default::default()
},
)?
};
Ok(Self { dirs, cache })
}
/// Save the pipeline cache
///
/// It is recommended to call this method manually, rather than let the
/// destructor save the cache automatically, as this lets you control how
/// errors are reported and integrate it into a broader application-wide
/// error handling policy.
pub fn try_save(&mut self) -> Result<(), Box<dyn Error>> {
std::fs::write(Self::cache_path(&self.dirs), self.cache.get_data()?)?;
Ok(())
}
/// Compute the pipeline cache path
fn cache_path(dirs: &ProjectDirs) -> PathBuf {
dirs.cache_dir().join("PipelineCache.bin")
}
}
//
impl Drop for PersistentPipelineCache {
fn drop(&mut self) {
// Cannot cleanly report errors in destructors
if let Err(e) = self.try_save() {
eprintln!("Failed to save Vulkan pipeline cache: {e}");
}
}
}Putting it all together
As you can see, setting up Vulkan involves a number of steps. In computer
graphics, the tradition is to regroup all of these steps into the constructor of
a large Context struct whose members feature all API objects that we envision
to need later on. We will follow this tradition:
pub struct VulkanContext {
/// Logical device (used for resource allocation)
pub device: Arc<Device>,
/// Command queue (used for command submission)
pub queue: Arc<Queue>,
/// Memory object allocator
pub memory_alloc: Arc<MemoryAllocator>,
/// Command buffer allocator
pub command_alloc: Arc<CommandBufferAllocator>,
/// Descriptor set allocator
pub descriptor_alloc: Arc<DescriptorSetAllocator>,
/// Pipeline cache with on-disk persistence
pub pipeline_cache: PersistentPipelineCache,
/// Messenger that prints out Vulkan debug messages until destroyed
_messenger: DebugUtilsMessenger,
}
//
impl VulkanContext {
/// Set up the Vulkan context
pub fn new(
debug_println: impl Fn(String) + RefUnwindSafe + Send + Sync + 'static,
) -> Result<Self, Box<dyn Error>> {
let (instance, messenger) = create_instance(debug_println)?;
// Not imposing any extra constraint on devices for now
let physical_device = pick_physical_device(&instance, |_device| true)?;
let (device, queue) = create_device_and_queue(physical_device)?;
let (memory_alloc, command_alloc, descriptor_alloc) = create_allocators(device.clone());
let pipeline_cache = PersistentPipelineCache::new(device.clone())?;
Ok(Self {
device,
queue,
memory_alloc,
command_alloc,
descriptor_alloc,
pipeline_cache,
_messenger: messenger,
})
}
/// Run all inner manual destructors
pub fn finish(&mut self) -> Result<(), Box<dyn Error>> {
self.pipeline_cache.try_save()?;
Ok(())
}
}And with that, we have wrapped up what the gpu::context module of the
provided course skeleton does. The rest will be integrated next!
Exercise
In the Rust project that you have been working on so far, the above GPU support
is already present, but it is in a dedicated gpu module that is only compiled
in when the gpu compile-time feature is enabled. This is achieved using a
#[cfg(feature = "gpu")] compiler directive.
So far, that build feature has been disabled by default. This allowed you to
enjoy faster builds, unpolluted by the cost of building GPU dependencies like
vulkano. These are huge libraries with a significant compilation cost, because
Vulkan itself is a huge specification.
However, now that we actually do want to run with GPU support enabled, the
default of not building the GPU code is not the right one anymore. Therefore,
please add the following line to the [features] section of the Cargo.toml
file at the root of the repository:
default = ["gpu"]
This has the same effect as passing --features=gpu to every cargo command
that you will subsequently run: it will enable the optional gpu compile-time
feature of the project, along with associated optional dependencies.
You will then want to add a VulkanContext::new() call at the beginning of the
simulate microbenchmark and binary, call the finish() method.
Now, GPU APIs are faillible, so these methods return Results and you are
expected to handle the associated errors. We will showcase the flexibility of
Result by handling errors differently in microbenchmarks and in the main
simulate binary:
- In the microbenchmark, you will handle errors by panicking. Just call the
expect()method of the results of the context functions, pass them an error message, and if an error occurs the program will panic with this error message. - In
bin/simulate, you will instead generalize the current hdf5-specific error type toBox<dyn Error>, so that you can propagate Vulkan errors out ofmain()just like we already do for HDF5 errors.
If you have done everything right, both binaries should now compile and run successfully. They are not doing anything useful with Vulkan right now, but lack of error means that our GPU driver/emulation works perform the basic setup work as expected, which is already a start!
Recall that the GPU driver’s memory allocators perform slowly and can have other weird and undesirable properties like heavily limiting the total number of allocations or acquiring global driver mutexes.
Did I already mention that GPU hardware manufacturers are not reknowned for their programming skills?
Shader
So far, we have mostly been working on common Vulkan boilerplate that could easily be reused in another application, with minor changes and extra configuration options. Now it’s time to actually start writing some Gray-Scott reaction simulation code.
In this chapter, we will write the part of the simulation code that actually runs on the GPU. Vulkan calls it a shader, but if you feel more comfortable calling it a kernel, I won’t judge you. I’ll let the Linux contributors in the room do it for me. 😉
Introducing GLSL
One benefit of Khronos’ decision to switch to the SPIR-V intermediate representation was that it became theoretically possible to use any compiled programming language you like to write the GPU-side code. All you need is a new compiler backend that emits SPIR-V instead of machine code.
Sadly, compiler backends are big pieces of work, so Rust is not quite there yet.
All we have today is a promising prototype called
rust-gpu. I hope to introduce it
in a future edition of this course1, but it felt a bit too experimental for
this year’s edition.
Therefore, we will prefer the tried and true alternative of Khronos’ standard GPU programming language: the OpenGL Shading Language, or GLSL for short.
GLSL is, along with HLSL, one of the two most important programming languages in the history of GPU computing. It was originally designed as a companion to the OpenGL GPU API, the predecessor to Vulkan in Khronos’ family of GPU APIs, and therefore its specification can be found right next to the OpenGL specification on the Khronos Group website.
GLSL is a derivative of the C programming language, which dropped some of C’s most controversial features2 and introduced many extensions to C to meet the needs of GPU computing.
To give some examples, in GLSL you can easily…
- Specify how the GPU code will interface with Vulkan on the CPU side.
- Easily manipulate vectors and matrices, but only up to dimension 4x4.3
- Exploit GPU texturing units to more efficiently manipulate 2/3D arrays, interpolate 1/2/3D data, and perform on-the-fly conversions between many image formats.
- Selectively let the compiler optimize operations in a numerically unstable
fashion (similar to GCC’s
-ffast-math, except SPIR-V makes it fine-grained and calls itRelaxedPrecision). - Control the fashion in which the GPU program execution’s will be decomposed into work-groups (the Vulkan equivalent of NVidia CUDA’s thread blocks).
- Allow the value of a compilation constant to be specified before the shader’s SPIR-V is compiled into a device binary, to improve configurability and compiler optimizations.
- Enjoy a more extensive library of built-in math functions than C could ever dream of.
- …and many other things revolving around the high-speed drawing of textured triangles that we will not care much about in everyday numerical computing.4
As you can see, this opens quite a few interesting possibilities. And that’s
part of why rust-gpu is still experimental in spite of having been in
development for quite a while. Making a good new GPU programming language is
actually not only a matter of adding a SPIR-V backend to the compiler (which is
already a large amount of work), it’s also a matter of extending the source
programming language and its standard library to expose all the GPU features
that GPU-specific programming languages have been exposing forever.5
Our first GLSL Gray-Scott
Let us now go through a GLSL implementation of the Gray-Scott reaction simulation. This first implementation isn’t heavily tuned for performance, however it does try to leverage GLSL-specific features where the impact on readability is small and it should help runtime performance.
First of all, we specify which version of the GLSL specification the program is written against. Here, we are using the latest and greatest GLSL 4.60 specification.
#version 460
Then we start to specify the interface between the CPU and the GPU code. This is a danger zone. Anytime we change this part of the GPU code, we must remember to keep matching code on the CPU side in sync, or else the GPU program will produce completely wrong results if it runs at all.
// Initial concentrations of species U and V
layout(set = 0, binding = 0) uniform sampler2D us;
layout(set = 0, binding = 1) uniform sampler2D vs;
// Final concentrations of species U and V
layout(set = 0, binding = 2) uniform restrict writeonly image2D nextUs;
layout(set = 0, binding = 3) uniform restrict writeonly image2D nextVs;
// Computation parameters uniform
layout(set = 1, binding = 0) uniform Parameters {
mat3 weights;
float diffusion_rate_u, diffusion_rate_v,
feed_rate, kill_rate,
time_step;
} params;
// Workgroup dimensions
layout(local_size_x = 8, local_size_y = 8) in;
There is a fair bit to unpack here:
usandvsare 2D samplers representing our input data. There are two interfaces to GPU texturing units in Khronos APIs, images and samplers. Images let us leverage the optimized data layout of GPU textures for 2/3D spatial locality. Samplers build on top of images to provide us with optional interpolation features (not used here) and well-defined handling of out-of-bound accesses (used here to enforce the simulation’s zero boundary condition).nextUsandnextVsare 2D images representing our output data. Here we do not need samplers because we will not be performing out-of-bounds accesses on the output side. We can also help the GPU compiler optimize code better that telling it that these images do not alias with any other input/output data in memory and will not be read from.paramsis a struct that lets us pass simulation parameters to the GPU code. Notice that unlike the CPU code, the GPU code does not know about some computation parameters at compile time, which puts it at a slight performance disadvantage. By using specialization constants, we could reverse this and let the GPU code know about all simulation parameters at compile time.- All variables introduced so far are
uniforms, which means that all work-items (same thing as CUDA threads) in a given shader execution agree on their value. This greatly improves GPU code performance by letting the GPU hardware share associated state (registers, etc) between concurrent computations, and is in fact mandatory for images and samplers. - To enable binding associated resources from the CPU side, each of these inputs and outputs is assigned a set and binding number. Here, we have made all inputs and outputs part of set 0, and all parameters part of set 1. Thi set-binding hierarchy lets us flip simulation inputs/outputs in a single API transaction, without needing to rebind unchanging parameters.
- Finally, we specify the work-group size, which is Vulkan’s equivalent of CUDA’s thread-block size. For now, we hardcode it in the shader code, but later we could make it runtime-configurable using specialization constants.
After specifying the CPU/GPU interface, we add a few simple utilities to make it easier to use. First, we write a pair of more ergonomic wrappers on top of GLSL’s very general but somewhat unwieldy image and sampler access functions…
// Read the current value of the concentration
vec2 read_uv(const ivec2 input_idx) {
const vec2 input_pos = vec2(input_idx) + 0.5;
return vec2(
texture(us, input_pos).r,
texture(vs, input_pos).r
);
}
// Write the next value of the concentration
void write_uv(const ivec2 output_idx, const vec2 uv) {
imageStore(nextUs, output_idx, vec4(uv.x));
imageStore(nextVs, output_idx, vec4(uv.y));
}
…and second, we give ourselves a way to refer to the stencil’s 2D dimensions and center position:
// Diffusion stencil properties
const ivec2 stencil_shape = ivec2(params.weights.length(),
params.weights[0].length());
const ivec2 stencil_offset = ivec2((stencil_shape - 1) / 2);
Finally, we introduce the body of the Gray-Scott reaction computation:
// What each shader invocation does
void main() {
// Determine which central input and output location we act on
const ivec2 center_idx = ivec2(gl_GlobalInvocationID.xy);
// Read the center value of the concentration
const vec2 uv = read_uv(center_idx);
// Compute diffusion term for U and V
vec2 full_uv = vec2(0.);
const ivec2 top_left = center_idx - stencil_offset;
for (int x = 0; x < stencil_shape.x; ++x) {
for (int y = 0; y < stencil_shape.y; ++y) {
const vec2 stencil_uv = read_uv(top_left + ivec2(x, y));
full_uv += params.weights[x][y] * (stencil_uv - uv);
}
}
const float diffusion_u = params.diffusion_rate_u * full_uv.x;
const float diffusion_v = params.diffusion_rate_v * full_uv.y;
// Deduce rate of change in u and v
const float u = uv.x;
const float v = uv.y;
const float uv_square = u * v * v;
const float du = diffusion_u - uv_square + params.feed_rate * (1.0 - u);
const float dv = diffusion_v + uv_square
- (params.feed_rate + params.kill_rate) * v;
// Update u and v accordingly
write_uv(center_idx, uv + vec2(du, dv) * params.time_step);
}
Again, this could use some unpacking:
- Like CUDA, Vulkan and GLSL use a data-parallel execution model where each
work-item is tasked with processing one element of a 1/2/3D-dimensional grid.
We can read the position that we are tasked to process from the
gl_GlobalInvocationIDglobal 3D vector. Because our problem is 2D, we extract the first two coordinates of this vector, and convert them from floating-point to integer because that feels most correct here. - We then compute the diffusion term of the differential equation. Here we played a little with GLSL’s vector type to make the computations of U and V less redundant and possibly a little more efficient (depending on how smart your GPU driver’s compiler feels like being today).
- Finally, we update U and V using almost exactly the same logic as the CPU version.
Basic CPU-side integration
Following the historical conventions of GPU programmers, we first save our
GPU-side code into a source file with a .comp extension, which tells our IDE
tooling that this is a compute shader. We propose that you call it
grayscott.comp and put it inside of the exercises/src/gpu.
We then ensure that this shader is compiled to SPIR-V whenever our project is
built by using the vulkano-shaders library provided by the vulkano project.
We first add it as a dependency…
cargo add --optional vulkano-shaders
…and within the project’s Cargo.toml, we make it part of our gpu
optional feature.
[features]
gpu = ["dep:directories", "dep:vulkano", "dep:vulkano-shaders"]
Then within our code’s gpu::pipeline module, we create a new shader module
and ask vulkano_shaders to generate the SPIR-V code and some Rust support code
inside of it:
/// Compute shader used for GPU-side simulation
mod shader {
vulkano_shaders::shader! {
ty: "compute",
path: "src/gpu/grayscott.comp",
}
}To make the code more maintainable, we give human-readable names to the shader binding points. These constants will still need to be kept up to date if the associated GLSL interface evolves over time, but at least we won’t need to update magic numbers spread all over the code:
#![allow(unused)] fn main() { /// Shader descriptor set to which input and output images are bound pub const IMAGES_SET: u32 = 0; /// Descriptor within `IMAGES_SET` for sampling of input U concentration pub const IN_U: u32 = 0; /// Descriptor within `IMAGES_SET` for sampling of input V concentration pub const IN_V: u32 = 1; /// Descriptor within `IMAGES_SET` for writing to output U concentration pub const OUT_U: u32 = 2; /// Descriptor within `IMAGES_SET` for writing to output V concentration pub const OUT_V: u32 = 3; /// Shader descriptor set to which simulation parameters are bound pub const PARAMS_SET: u32 = 1; /// Descriptor within `PARAMS_SET` for simulation parameters pub const PARAMS: u32 = 0; /// Work-group shape of the shader pub const WORK_GROUP_SHAPE: [u32; 2] = [8, 8]; }
Finally, we will need a Rust struct which matches the definition of the
GPU-side simulation parameters. Thankfully, vulkano_shaders saves us from the
trouble of a duplicate type definition by automatically generating one Rust
version of each type from the input GLSL code. All we need to do is to
expose it so other code can use it:
/// Simulation parameters, in a GPU-friendly layout
///
/// This syntax lets you re-export a type defined in another module as if you
/// defined said type yourself
pub use shader::Parameters;And that’s it: now we have autogenerated SPIR-V in our code, along with a CPU-side version of our CPU-GPU interface declarations.
Exercise
Integrate all of the above into the Rust project’s gpu::pipeline module, and
make sure that the code still compiles. A test run is not useful here as runtime
behavior is unchanged for now.
Along with krnl, a CUDA-like
simplified GPU computing layer built on top of rust-gpu and Vulkan.
In particular, GLSL removed a lot of C’s implicit conversions, and fully drops pointers. The latter are largely replaced by much improved dynamically sized array support and function in/out/inout parameters.
What else would you expect from a language designed by and for computer graphics experts?
…though people these days are increasingly interested in the potential physics simulation applications of the hardware ray-tracing acceleration units that were introduced by recent GPUs from NVidia and AMD.
In case you are wondering, on the C++ side, CUDA and SYCL mostly ignore
this problem by not supporting half of GLSL’s most useful features. But
the rust-gpu developers aim for performance parity with well-optimized
GLSL code, and are therefore unwilling to settle for this shortcut.
Pipeline
As you may have figured out while reading the previous chapter, GPU shaders are not self-sufficient. Almost every useful shader needs to interact with CPU-provided input and output resources, so before a shader can run, CPU-side steering code must first bind input and output resources to the shader’s data interface.
In an attempt to simplify the life of larger applications, GPU APIs like to make this resource binding process very flexible. But there is a tradeoff there. If the Vulkan spec just kept adding more configuration options at resource binding time, it would quickly cause two problems:
- Resource binding calls, which are on the application’s performance-critical code path where GPU shaders can be executed many times in rapid succession, could become more complex and more expensive to process by the GPU driver.
- GPU compilers would know less and less about the resource binding setup in use, and would generate increasingly generic and unoptimized shader code around access to resources.1
To resolve these problems and a few others2, Vulkan has introduced pipelines. A compute pipeline extends an underlying compute shader with some early “layout” information about how we are going to bind resources later on. What is then compiled by the GPU driver and executed by the GPU is not a shader, but a complete pipeline. And as a result, we get GPU code that is more specialized for the input/output resources that we are eventually going to bind to it, and should therefore perform better without any need for run-time recompilation.
In this chapter, we will see what steps are involved in order to turn our previously written Gray-Scott simulation compute shader into a compute pipeline.
From shader to pipeline stage
First of all, vulkano-shaders generated SPIR-V code from our GLSL, but we must
turn it into a device-specific
ShaderModule
before we do anything with it. This is done using the load() function that
vulkano-shaders also generated for us within the gpu::pipeline::shader
module:
let shader_module = shader::load(context.device.clone())?;We are then allowed to adjust the value of specialization constants within the module, which allows us to provide simulation parameters at JiT compilation time and let the GPU code be specialized for them. But we are not using this Vulkan feature yet, so we will skip this step for now.
After specializing the module’s code, we must designate a function within the
module that will act as an entry point for our compute pipeline. Every function
that takes no parameters and returns no result is an entry point candidate, and
for simple modules with a single entry point, vulkano provides us with a
little shortcut:
let entry_point = shader_module
.single_entry_point()
.expect("No entry point found");From this entry point, we can then define a pipeline stage. This is the point where we would be able to adjust the SIMD configuration on GPUs that support several of them, like Nvidia’s post-Volta GPUs and Intel’s integrated GPUs. But we are not doing SIMD configuration fine-tuning in our very first example of Vulkan computing, so we’ll just stick with the defaults:
use vulkano::pipeline::PipelineShaderStageCreateInfo;
let shader_stage = PipelineShaderStageCreateInfo::new(entry_point);If we were doing 3D graphics, we would need to create more of these pipeline stages: one for vertex processing, one for fragment processing, several more if we’re using optional features like tesselation or hardware ray tracing… but here, we are doing compute pipelines, which only have a single stage, so at this point we are done specifying what code our compute pipeline will run.
Pipeline layout
Letting vulkano help us
After defining our single compute pipeline stage, we must then tell Vulkan about
the layout of our compute pipeline’s inputs and outputs. This is basically the
information that we specified in our GLSL shader’s I/O interface, extended with
some performance tuning knobs, so vulkano provides us with a way to infer a
basic default configuration from the shader itself:
use vulkano::pipeline::layout::PipelineDescriptorSetLayoutCreateInfo;
let mut layout_info =
PipelineDescriptorSetLayoutCreateInfo::from_stages([&shader_stage]);There are three parts to the pipeline layout configuration:
flags, which are not used for now, but reserved for use by future Vulkan versions.set_layouts, which lets us configure each of our shader’s descriptor sets.push_constant_ranges, which let us configure its push constants.
We have not introduced push constants before. They are a way to quickly pass small amounts of information (hardware-dependent, at least 128 bytes) to a pipeline by directly storing it inline within the GPU command that starts the pipeline’s execution. We will not need them in this Gray-Scott reaction simulation because there are no simulation inputs that vary on each simulation step other than the input image, which itself is way too big to fit inside of a push constant.
Therefore, the only thing that we actually need to pay attention to in this
pipeline layout configuration is the set_layouts descriptor set configuration.
Configuring our input descriptors
This is a Vec that contains one entry per descriptor set that our shader
refers to (i.e. each distinct set = xxx number found in the GLSL code). For
each of these descriptor sets, we can adjust some global configuration that
pertains to advanced Vulkan features beyond the scope of this course, and then
we have one configuration per binding (i.e. each distinct binding = yyy number
used together with this set = xxx number in GLSL code).
Most of the per-binding configuration, in turn, was filled out by vulkano with
good default values. But there is one of them that we will want to adjust.
In Vulkan, when using sampled images (which we do in order to have the GPU handle out-of-bounds values for us), it is often the case that we will not need to adjust the image sampling configuration during the lifetime of the application. In that case, it is more efficient to specialize the GPU code for the sampling configuration that we are going to use. Vulkan lets us do this by specifying that configuration at compute pipeline creation time.
To this end, we first create a sampler…
use vulkano::image::sampler::{
BorderColor, Sampler, SamplerAddressMode, SamplerCreateInfo
};
let input_sampler = Sampler::new(
context.device.clone(),
SamplerCreateInfo {
address_mode: [SamplerAddressMode::ClampToBorder; 3],
border_color: BorderColor::FloatOpaqueBlack,
unnormalized_coordinates: true,
..Default::default()
},
)?;…and then we add it as an immutable sampler to the binding descriptors associated with our simulation shader’s inputs:
let image_bindings = &mut layout_info.set_layouts[IMAGES_SET as usize].bindings;
image_bindings
.get_mut(&IN_U)
.expect("Did not find expected shader input IN_U")
.immutable_samplers = vec![input_sampler.clone()];
image_bindings
.get_mut(&IN_V)
.expect("Did not find expected shader input IN_V")
.immutable_samplers = vec![input_sampler];Let us quickly go through the sampler configuration that we are using here:
- The
ClampToBorderaddress mode ensures that any out-of-bounds read from this sampler will return a color specified byborder_color. - The
FloatOpaqueBlackborder color specifies the floating-point RGBA color[0.0, 0.0, 0.0, 1.0]. We will only be using the first color component, so theFloatTransparentBlackalternative would be equally appropriate here. - The
unnormalized_coordinatesparameter lets us index the sampled texture by pixel index, rather than by a normalized coordinate from 0.0 to 1.0 that we would need to derive from the pixel index in our case.
The rest of the default sampler configuration works for us.
Building the compute pipeline
With that, we are done configuring our descriptors, so we can finalize our descriptor set layouts…
let layout_info = layout_info
.into_pipeline_layout_create_info(context.device.clone())?;…create our compute pipeline layout…
use vulkano::pipeline::layout::PipelineLayout;
let layout = PipelineLayout::new(context.device.clone(), layout_info)?;…and combine that with the shader stage that we have created in the previous section and the compilation cache that we have created earlier in order to build our simulation pipeline.
use vulkano::pipeline::compute::{ComputePipeline, ComputePipelineCreateInfo};
let pipeline = ComputePipeline::new(
context.device.clone(),
Some(context.pipeline_cache.cache.clone()),
ComputePipelineCreateInfo::stage_layout(shader_stage, layout),
)?;Exercise
Integrate all of the above into the Rust project’s gpu::pipeline module, as a
new create_pipeline() function, then make sure that the code still compiles. A
test run is not useful here as runtime behavior remains unchanged for now.
There is an alternative to this, widely used by OpenGL drivers, which is to recompile more specialized shader code at the time where resources are bound. But since resources are bound right before a shader is run, this recompilation work can result in a marked execution delay on shader runs for which the specialized code has not been compiled yet. In real-time graphics, delaying frame rendering work like this is highly undesirable, as it can result in dropped frames and janky on-screen movement.
…like the problem of combining separately defined vertex, geometry, tesselation and fragment shaders in traditional triangle rasterization pipelines.
Resources
Little by little, we are making progress in our Vulkan exploration, to the point where we now have a compute pipeline that lets us run our code on the GPU. However, we do not yet have a way to feed this code with data inputs and let it emit data outputs. In this chapter, we will see how that is done.
From buffers to descriptor sets
Vulkan has two types of memory resources, buffers and images. Buffers are both simpler to understand and a prerequisite for using images, so we will start with them. In short, a buffer is nothing more than a fixed-sized allocation of CPU or GPU memory that is managed by Vulkan.
By virtue of this simple definition, buffers are very flexible. We can use them for CPU memory that can be (slowly) accessed by the GPU, for sources and destinations of CPU <=> GPU data transfers, for fast on-GPU memory that cannot be accessed by the CPU… But there is a flip side to this flexibility, which is that the Vulkan implementation is going to need some help from our side in order to wisely decide how the memory that backs a buffer should be allocated.
As a first example, let us write down our simulation parameters to memory that is accessible from to the CPU, but preferably resident on the GPU, so that subsequent accesses from the GPU are fast.
First of all, we initialize our GPU parameters struct, assuming availability of simulation options:
use crate::{
gpu::pipeline::Parameters,
options::{
UpdateOptions, DIFFUSION_RATE_U, DIFFUSION_RATE_V, STENCIL_WEIGHTS,
},
};
use vulkano::padded::Padded;
/// Collect GPU simulation parameters
fn create_parameters_struct(update_options: &UpdateOptions) -> Parameters {
Parameters {
// Beware that GLSL matrices are column-major...
weights: std::array::from_fn(|col| {
// ...and each column is padded to 4 elements for SIMD reasons.
Padded::from(
std::array::from_fn(|row| {
STENCIL_WEIGHTS[row][col]
})
)
}),
diffusion_rate_u: DIFFUSION_RATE_U,
diffusion_rate_v: DIFFUSION_RATE_V,
feed_rate: update_options.feedrate,
kill_rate: update_options.killrate,
time_step: update_options.deltat,
}
}We then create a CPU-accessible buffer that contains this data:
use vulkano::{
buffer::{Buffer, BufferCreateInfo, BufferUsage},
memory::allocator::{AllocationCreateInfo, MemoryTypeFilter},
};
let parameters = Buffer::from_data(
context.memory_alloc.clone(),
BufferCreateInfo {
usage: BufferUsage::UNIFORM_BUFFER,
..Default::default()
},
AllocationCreateInfo {
memory_type_filter:
MemoryTypeFilter::HOST_SEQUENTIAL_WRITE
| MemoryTypeFilter::PREFER_DEVICE,
..Default::default()
},
create_parameters_struct()
)?;Notice how vulkano lets us specify various metadata about how we intend to use
the buffer. Having this metadata around allows vulkano and the Vulkan
implementation to take more optimal decisions when it comes to where memory
should be allocated.
This matters because if you run vulkaninfo on a real-world GPU, you will
realize that all the higher-level compute APIs like CUDA and SYCL have been
hiding things from you all this time, and it is not uncommon for a GPU to expose
10 different memory heaps with different limitations and performance
characteristics. Picking between all these heaps without having any idea of what
you will be doing with your memory objects is ultimately nothing more than an
educated guess.
Vulkan memory heaps on my laptop's AMD Radeon RX 5600M
VkPhysicalDeviceMemoryProperties:
=================================
memoryHeaps: count = 3
memoryHeaps[0]:
size = 6174015488 (0x170000000) (5.75 GiB)
budget = 6162321408 (0x16f4d9000) (5.74 GiB)
usage = 0 (0x00000000) (0.00 B)
flags: count = 1
MEMORY_HEAP_DEVICE_LOCAL_BIT
memoryHeaps[1]:
size = 33395367936 (0x7c684e000) (31.10 GiB)
budget = 33368653824 (0x7c4ed4000) (31.08 GiB)
usage = 0 (0x00000000) (0.00 B)
flags:
None
memoryHeaps[2]:
size = 268435456 (0x10000000) (256.00 MiB)
budget = 266260480 (0x0fded000) (253.93 MiB)
usage = 0 (0x00000000) (0.00 B)
flags: count = 1
MEMORY_HEAP_DEVICE_LOCAL_BIT
memoryTypes: count = 11
memoryTypes[0]:
heapIndex = 0
propertyFlags = 0x0001: count = 1
MEMORY_PROPERTY_DEVICE_LOCAL_BIT
usable for:
IMAGE_TILING_OPTIMAL:
color images
FORMAT_D16_UNORM
FORMAT_D32_SFLOAT
FORMAT_S8_UINT
FORMAT_D16_UNORM_S8_UINT
FORMAT_D32_SFLOAT_S8_UINT
IMAGE_TILING_LINEAR:
color images
memoryTypes[1]:
heapIndex = 0
propertyFlags = 0x0001: count = 1
MEMORY_PROPERTY_DEVICE_LOCAL_BIT
usable for:
IMAGE_TILING_OPTIMAL:
None
IMAGE_TILING_LINEAR:
None
memoryTypes[2]:
heapIndex = 1
propertyFlags = 0x0006: count = 2
MEMORY_PROPERTY_HOST_VISIBLE_BIT
MEMORY_PROPERTY_HOST_COHERENT_BIT
usable for:
IMAGE_TILING_OPTIMAL:
color images
FORMAT_D16_UNORM
FORMAT_D32_SFLOAT
FORMAT_S8_UINT
FORMAT_D16_UNORM_S8_UINT
FORMAT_D32_SFLOAT_S8_UINT
IMAGE_TILING_LINEAR:
color images
memoryTypes[3]:
heapIndex = 2
propertyFlags = 0x0007: count = 3
MEMORY_PROPERTY_DEVICE_LOCAL_BIT
MEMORY_PROPERTY_HOST_VISIBLE_BIT
MEMORY_PROPERTY_HOST_COHERENT_BIT
usable for:
IMAGE_TILING_OPTIMAL:
color images
FORMAT_D16_UNORM
FORMAT_D32_SFLOAT
FORMAT_S8_UINT
FORMAT_D16_UNORM_S8_UINT
FORMAT_D32_SFLOAT_S8_UINT
IMAGE_TILING_LINEAR:
color images
memoryTypes[4]:
heapIndex = 2
propertyFlags = 0x0007: count = 3
MEMORY_PROPERTY_DEVICE_LOCAL_BIT
MEMORY_PROPERTY_HOST_VISIBLE_BIT
MEMORY_PROPERTY_HOST_COHERENT_BIT
usable for:
IMAGE_TILING_OPTIMAL:
None
IMAGE_TILING_LINEAR:
None
memoryTypes[5]:
heapIndex = 1
propertyFlags = 0x000e: count = 3
MEMORY_PROPERTY_HOST_VISIBLE_BIT
MEMORY_PROPERTY_HOST_COHERENT_BIT
MEMORY_PROPERTY_HOST_CACHED_BIT
usable for:
IMAGE_TILING_OPTIMAL:
color images
FORMAT_D16_UNORM
FORMAT_D32_SFLOAT
FORMAT_S8_UINT
FORMAT_D16_UNORM_S8_UINT
FORMAT_D32_SFLOAT_S8_UINT
IMAGE_TILING_LINEAR:
color images
memoryTypes[6]:
heapIndex = 1
propertyFlags = 0x000e: count = 3
MEMORY_PROPERTY_HOST_VISIBLE_BIT
MEMORY_PROPERTY_HOST_COHERENT_BIT
MEMORY_PROPERTY_HOST_CACHED_BIT
usable for:
IMAGE_TILING_OPTIMAL:
None
IMAGE_TILING_LINEAR:
None
memoryTypes[7]:
heapIndex = 0
propertyFlags = 0x00c1: count = 3
MEMORY_PROPERTY_DEVICE_LOCAL_BIT
MEMORY_PROPERTY_DEVICE_COHERENT_BIT_AMD
MEMORY_PROPERTY_DEVICE_UNCACHED_BIT_AMD
usable for:
IMAGE_TILING_OPTIMAL:
color images
FORMAT_D16_UNORM
FORMAT_D32_SFLOAT
FORMAT_S8_UINT
FORMAT_D16_UNORM_S8_UINT
FORMAT_D32_SFLOAT_S8_UINT
IMAGE_TILING_LINEAR:
color images
memoryTypes[8]:
heapIndex = 1
propertyFlags = 0x00c6: count = 4
MEMORY_PROPERTY_HOST_VISIBLE_BIT
MEMORY_PROPERTY_HOST_COHERENT_BIT
MEMORY_PROPERTY_DEVICE_COHERENT_BIT_AMD
MEMORY_PROPERTY_DEVICE_UNCACHED_BIT_AMD
usable for:
IMAGE_TILING_OPTIMAL:
color images
FORMAT_D16_UNORM
FORMAT_D32_SFLOAT
FORMAT_S8_UINT
FORMAT_D16_UNORM_S8_UINT
FORMAT_D32_SFLOAT_S8_UINT
IMAGE_TILING_LINEAR:
color images
memoryTypes[9]:
heapIndex = 2
propertyFlags = 0x00c7: count = 5
MEMORY_PROPERTY_DEVICE_LOCAL_BIT
MEMORY_PROPERTY_HOST_VISIBLE_BIT
MEMORY_PROPERTY_HOST_COHERENT_BIT
MEMORY_PROPERTY_DEVICE_COHERENT_BIT_AMD
MEMORY_PROPERTY_DEVICE_UNCACHED_BIT_AMD
usable for:
IMAGE_TILING_OPTIMAL:
color images
FORMAT_D16_UNORM
FORMAT_D32_SFLOAT
FORMAT_S8_UINT
FORMAT_D16_UNORM_S8_UINT
FORMAT_D32_SFLOAT_S8_UINT
IMAGE_TILING_LINEAR:
color images
memoryTypes[10]:
heapIndex = 1
propertyFlags = 0x00ce: count = 5
MEMORY_PROPERTY_HOST_VISIBLE_BIT
MEMORY_PROPERTY_HOST_COHERENT_BIT
MEMORY_PROPERTY_HOST_CACHED_BIT
MEMORY_PROPERTY_DEVICE_COHERENT_BIT_AMD
MEMORY_PROPERTY_DEVICE_UNCACHED_BIT_AMD
usable for:
IMAGE_TILING_OPTIMAL:
color images
FORMAT_D16_UNORM
FORMAT_D32_SFLOAT
FORMAT_S8_UINT
FORMAT_D16_UNORM_S8_UINT
FORMAT_D32_SFLOAT_S8_UINT
IMAGE_TILING_LINEAR:
color images
Finally, as we mentioned previously, Vulkan makes you group memory resources together in descriptor sets in order to let you amortize the cost of binding resources to shaders. These groups should not be assembled randomly, of course. Resources should be grouped such that shader parameters that change together are grouped together, and slow-changing parameters are not grouped together with fast-changing parameters. In this way, most of the time, you should be able to rebind only those GPU resources that did change, in a single API binding call.
Because our Gray-Scott simulation is relatively simple, we have no other memory resource with a lifetime that is similar to the simulation parameters (which can be bound for the duration of the entire simulation). Therefore, our simulation parameters will be alone in their descriptor set:
use crate::gpu::pipeline::{PARAMS_SET, PARAMS};
use vulkano::{
descriptor_set::{
persistent::PersistentDescriptorSet,
WriteDescriptorSet
},
pipeline::Pipeline,
};
let descriptor_set = PersistentDescriptorSet::new(
&context.descriptor_alloc,
pipeline.layout().set_layouts()[PARAMS_SET as usize].clone(),
[WriteDescriptorSet::buffer(PARAMS, buffer)],
[],
)?;All in all, if we leverage the shortcuts that vulkano provides us with, it
essentially takes three steps to go from having CPU-side simulation parameters
to having a parameters descriptor set that we can bind to our compute pipeline:
use crate::gpu::context::VulkanContext;
use std::{sync::Arc, error::Error};
use vulkano::{
pipeline::compute::ComputePipeline,
};
pub fn create_parameters(
context: &VulkanContext,
pipeline: &ComputePipeline,
update_options: &UpdateOptions,
) -> Result<Arc<PersistentDescriptorSet>, Box<dyn Error>> {
// Assemble simulation parameters into a struct with a GPU-compatible layout
let parameters = create_parameters_struct(update_options);
// Create a buffer and put the simulation parameters into it
let buffer = Buffer::from_data(
context.memory_alloc.clone(),
BufferCreateInfo {
usage: BufferUsage::UNIFORM_BUFFER,
..Default::default()
},
AllocationCreateInfo {
memory_type_filter:
MemoryTypeFilter::HOST_SEQUENTIAL_WRITE
| MemoryTypeFilter::PREFER_DEVICE,
..Default::default()
},
parameters,
)?;
// Create a descriptor set containing only this buffer, since no other
// resource has the same usage pattern as the simulation parameters
let descriptor_set = PersistentDescriptorSet::new(
&context.descriptor_alloc,
pipeline.layout().set_layouts()[PARAMS_SET as usize].clone(),
[WriteDescriptorSet::buffer(PARAMS, buffer)],
[],
)?;
Ok(descriptor_set)
}Concentration images
Did you say images?
As previously mentioned, Vulkan images give us access to the power of GPU texturing units, which were designed to speed up and simplify the chore of handling multidimensional data with optional linear interpolation, proper handling of boundary conditions, on-the-fly data decompression, and easy conversions between many common pixel formats.
But alas, this is the GPU world1, so with great power comes great API complexity:
- To handle multidimensional data efficiently, GPU texturing units must store it in an optimized memory layout. The actual layout is hidden from you2, which means that you must prepare your data into a buffer with a standard layout, and then use a special copy command to make the GPU translate from your standard layout to its optimized internal texture layout.
- To handle on-the-fly data decompression, interpolation and pixel format conversions, the GPU hardware must know about the data types that you are manipulating. This means that images cannot accept all 1/2/3D arrays of any arbitrary user-defined data types, and must instead be restricted to a finite set of pixel types whose support varies from one GPU to another.
Staging buffer
Since we have to, we will start by building a buffer that contains our image data in Vulkan’s standard non-strided row-major layout. Because buffers are one-dimensional, this will require a little bit of index wrangling, but a survivor of the Advanced SIMD chapter should easily handle it.
use crate::{data::Float, options::RunnerOptions};
use vulkano::buffer::{AllocateBufferError, Subbuffer};
/// Set up U and V concentration buffers
///
/// Returns first U, then V. We were not making this a struct yet because there
/// is a bit more per-species state that we will eventually need.
fn create_concentration_buffers(
context: &VulkanContext,
options: &RunnerOptions,
) -> Result<[Subbuffer<[Float]>; 2], Validated<AllocateBufferError>> {
// Define properties that are common to both buffers
let [num_rows, num_cols] = [options.num_rows, options.num_cols];
let num_pixels = num_rows * num_cols;
let create_info = BufferCreateInfo {
usage: BufferUsage::TRANSFER_SRC | BufferUsage::TRANSFER_DST,
..Default::default()
};
let allocation_info = AllocationCreateInfo {
memory_type_filter:
MemoryTypeFilter::HOST_SEQUENTIAL_WRITE
| MemoryTypeFilter::PREFER_HOST,
..Default::default()
};
let pattern = |idx: usize| {
let (row, col) = (idx / num_cols, idx % num_cols);
(row >= (7 * num_rows / 16).saturating_sub(4)
&& row < (8 * num_rows / 16).saturating_sub(4)
&& col >= 7 * num_cols / 16
&& col < 8 * num_cols / 16) as u8 as Float
};
// Concentration of the U species
let u = Buffer::from_iter(
context.memory_alloc.clone(),
create_info.clone(),
allocation_info.clone(),
(0..num_pixels).map(|idx| 1.0 - pattern(idx)),
)?;
// Concentration of the V species
let v = Buffer::from_iter(
context.memory_alloc.clone(),
create_info,
allocation_info,
(0..num_pixels).map(pattern),
)?;
Ok([u, v])
}Creating images
Now that we have buffers of initial data, we can make images…
use vulkano::{
format::Format,
image::{AllocateImageError, Image, ImageCreateInfo, ImageUsage},
};
/// Create 4 images for storing the input and output concentrations of U and V
fn create_images(
context: &VulkanContext,
options: &RunnerOptions,
) -> Result<Vec<Arc<Image>>, Validated<AllocateImageError>> {
let create_info = ImageCreateInfo {
format: Format::R32_SFLOAT,
extent: [options.num_cols as u32, options.num_rows as u32, 1],
usage: ImageUsage::TRANSFER_SRC | ImageUsage::TRANSFER_DST
| ImageUsage::SAMPLED | ImageUsage::STORAGE,
..Default::default()
};
let allocation_info = AllocationCreateInfo::default();
let images =
std::iter::repeat_with(|| {
Image::new(
context.memory_alloc.clone(),
create_info.clone(),
allocation_info.clone(),
)
})
.take(4)
.collect::<Result<Vec<_>, _>>()?;
Ok(images)
}…but some choices made in the above code could use a little explanation:
- You need to be careful that numerical computing APIs and GPU APIs do not use
the same conventions when denoting multidimensional array shapes. Numerical
scientists tend to think of 2D shapes as
[num_rows, num_cols], whereas graphics programmeurs tend to think of them as[width, height], which is the reverse order. Pay close attention to this, as it is a common source of bugs when translating numerical code to GPU APIs. - Our images need to have all of these usage bit sets because we’ll need to send
initial data from the CPU (TRANSFER_DST), use some images as input (SAMPLED)
and other images as output (STORAGE) in a manner where images keep alternating
between the two roles, and in the end bring back output data to the CPU
(TRANSFER_DST).
- Here the Vulkan expert may reasonably wonder if the implementation could go faster if we allocated more images with more specialized usage flags and copied data between them as needed. We will get back to this question once we are done implementing the naive simulation and start discussing possible optimizations.
- The final code statement uses semi-advanced iterator trickery to create 4
images without duplicating the associated line of code 4 times, even though
vulkano’sImagetype is not clonable because Vulkan provides no easy image-cloning operation.- The iterator pipeline is made a little bit more complex by the fact that
images creation can fail, and therefore returns a
Result. We do not want to end up with aVec<Result<Image, _>>in the end, so instead we leverage the fact that Rust allows you to collect an iterator ofResult<Image, Err>into aResult<Vec<Image>, Err>.
- The iterator pipeline is made a little bit more complex by the fact that
images creation can fail, and therefore returns a
Introduction to command buffers
As we have discussed previously, Vulkan images have no initial content. We need to transfer the initial data from our U and V concentration buffers to a pair of images, which will be our initial input. To do this, we will have to send the GPU some buffer-to-image copy commands, which means that for the first time in this Vulkan practical, we will actually be asking the GPU to do some work.
Sending work to the GPU is very resource-intensive for several reasons, one of which is that CPU-GPU communication over the PCIe bus has a high latency and involves a complicated protocol. This means that the only way to make good use of this hardware interconnect is to send not one, but many commands at the same time. Vulkan helps you to do so by fully specifying its GPU command submission API in terms of batches of commands called command buffers, which are explicitly exposed in the API and therefore can be easily generated by multiple CPU threads in scenarios where command preparation on the CPU side becomes a bottleneck.3
In fact, Vulkan took this one step further, and introduced the notion of secondary command buffers to let you use command buffers as commands inside of other command buffers, which is convenient when you want to reuse some but not all GPU commands from one computation to another…

…but this Vulkan feature is rather controversial and GPU vendors provide highly contrasting advice regarding its use (just compare the section of the AMD and NVidia optimization guides on command submission). Therefore, it will come at no surprise that we will not cover the topic any further in this course. Instead, we will focus our attention to primary command buffers, which are the “complete” buffers that are submitted to the GPU at the end.
Initializing input images
To initialize our input images, we will start with by creating
AutoCommandBufferBuilder,
which is vulkano’s high-level abstraction for making Vulkan command buffers
easier to build:
use vulkano::command_buffer::{
auto::AutoCommandBufferBuilder,
CommandBufferUsage,
};
let mut upload_builder = AutoCommandBufferBuilder::primary(
&context.command_alloc,
context.queue.queue_family_index(),
CommandBufferUsage::OneTimeSubmit,
)?;Then we’ll add a pair of commands to fill the first images with data from our concentration buffers:
use vulkano::command_buffer::CopyBufferToImageInfo;
for (buffer, image) in buffers.iter().zip(images) {
upload_builder.copy_buffer_to_image(
CopyBufferToImageInfo::buffer_image(
buffer.clone(),
image.clone(),
)
)?;
}As it turns out, we have no other GPU work to submit during application initialization. Therefore, we will build a command buffer with just these two upload commands…
let command_buffer = upload_builder.build()?;…submit it to our command queue…
use vulkano::command_buffer::PrimaryCommandBufferAbstract;
let execute_future = command_buffer.execute(context.queue.clone())?;…ask Vulkan to send all pending commands to the GPU side and tell us when they are done executing via a synchronization primitive called a fence4.
use vulkano::sync::GpuFuture;
let fence_future = execute_future.then_signal_fence_and_flush()?;…and finally wait for the work to complete without any timeout:
fence_future.wait(None)?;After this line of code, our first two concentration images will be initialized. To put it all together…
fn initialize_images(
context: &VulkanContext,
buffers: &[Subbuffer<[Float]>],
images: &[Arc<Image>],
) -> Result<(), Box<dyn Error>> {
assert!(images.len() > buffers.len());
let mut upload_builder = AutoCommandBufferBuilder::primary(
&context.command_alloc,
context.queue.queue_family_index(),
CommandBufferUsage::OneTimeSubmit,
)?;
for (buffer, image) in buffers.iter().zip(images) {
upload_builder.copy_buffer_to_image(
CopyBufferToImageInfo::buffer_image(
buffer.clone(),
image.clone(),
)
)?;
}
// Notice how these APIs are meant to chain nicely, like iterator adapters
upload_builder
.build()?
.execute(context.queue.clone())?
.then_signal_fence_and_flush()?
.wait(None)?;
Ok(())
}Descriptor sets at last
With all the work it took to initialize our concentration images, it is easy to forget that what we will eventually bind to our compute pipeline is not individual images, but descriptor sets composed of four images: two input images with sampling, and two output images.
Unlike with simulation parameters, we will need two descriptor sets this time due to double buffering: one descriptor set where images #0 and #1 serve as inputs and images #2 and #3 serve as outputs, and another descriptor set where images #2 and #3 serve as inputs and images #0 and #1 serve as outputs. We will then start with the first descriptor set and alternate between the two descriptor sets as the simulation keeps running.
To this end, we will first write a little utility closure that sets up one descriptor set with two input and output images…
use crate::gpu::pipeline::{IMAGES_SET, IN_U, IN_V, OUT_U, OUT_V};
use vulkano::{
image::view::{ImageView, ImageViewCreateInfo},
Validated, VulkanError,
};
let create_set =
|[in_u, in_v, out_u, out_v]: [Arc<Image>; 4]| -> Result<_, Validated<VulkanError>> {
let layout = pipeline.layout().set_layouts()[IMAGES_SET as usize].clone();
let binding =
|binding, image: Arc<Image>, usage| -> Result<_, Validated<VulkanError>> {
let view_info = ImageViewCreateInfo {
usage,
..ImageViewCreateInfo::from_image(&image)
};
Ok(WriteDescriptorSet::image_view(
binding,
ImageView::new(image, view_info)?,
))
};
let descriptor_set = PersistentDescriptorSet::new(
&context.descriptor_alloc,
layout,
[
binding(IN_U, in_u, ImageUsage::SAMPLED)?,
binding(IN_V, in_v, ImageUsage::SAMPLED)?,
binding(OUT_U, out_u, ImageUsage::STORAGE)?,
binding(OUT_V, out_v, ImageUsage::STORAGE)?,
],
[],
)?;
Ok(descriptor_set)
};…and then we will use it to build our double-buffered descriptor set configuration:
fn create_concentration_sets(
context: &VulkanContext,
pipeline: &ComputePipeline,
images: &[Arc<Image>],
) -> Result<[Arc<PersistentDescriptorSet>; 2], Validated<VulkanError>> {
let create_set = /* ... as above ... */;
let [u1, v1, u2, v2] = [&images[0], &images[1], &images[2], &images[3]];
let descriptor_sets = [
create_set([u1.clone(), v1.clone(), u2.clone(), v2.clone()])?,
create_set([u2.clone(), v2.clone(), u1.clone(), v1.clone()])?,
];
Ok(descriptor_sets)
}Concentration state
As you can see, setting up the concentration images involved creating a fair
amount of Vulkan objects. Thankfully, owing to vulkano’s high-level API
design5, we will not need to keep all of them around, and it will suffice to
keep the objects that we use directly:
- Descriptor sets are used to specify our compute pipeline’s concentration inputs and outputs.
- The V species images are used, together with a matching buffer, to download the concentration of V from the GPU for the purpose of saving output data to HDF5 files.
We will bundle this state together using a double buffering abstraction similar to the one that we have used previously in the CPU code, trying to retain as much API compatibility as we can to ease the migration. But as you will see, this comes at a significant cost, so we may want to revisit this decision later on, after we get the code in a runnable and testable state.
use crate::gpu::context::CommandBufferAllocator;
use ndarray::Array2;
use vulkano::{
command_buffer::CopyImageToBufferInfo,
device::Queue,
};
pub struct Concentrations {
// Double buffered data
descriptor_sets: [Arc<PersistentDescriptorSet>; 2],
v_images: [Arc<Image>; 2],
src_is_1: bool,
// Area where we download the concentration of the V species
v_buffer: Subbuffer<[Float]>,
// Unsatisfying copy of the contents of `v_buffer`, present for API
// compatibility reasons.
v_ndarray: Array2<Float>,
// Subset of the GPU context that we need to keep around
// in order to provide CPU API compatibility
command_alloc: Arc<CommandBufferAllocator>,
queue: Arc<Queue>,
}
//
impl Concentrations {
/// Set up the simulation state
pub fn new(
context: &VulkanContext,
options: &RunnerOptions,
pipeline: &ComputePipeline,
) -> Result<Self, Box<dyn Error>> {
let buffers = create_concentration_buffers(context, options)?;
let images = create_images(context, options)?;
initialize_images(context, &buffers, &images)?;
let descriptor_sets = create_concentration_sets(context, pipeline, &images)?;
let [_, v_buffer] = buffers;
Ok(Self {
descriptor_sets,
v_images: [images[1].clone(), images[3].clone()],
src_is_1: false,
v_buffer,
v_ndarray: Array2::zeros([options.num_rows, options.num_cols]),
command_alloc: context.command_alloc.clone(),
queue: context.queue.clone(),
})
}
/// Shape of the simulation domain (using ndarray conventions)
pub fn shape(&self) -> [usize; 2] {
assert_eq!(self.v_images[0].extent(), self.v_images[1].extent());
let extent = &self.v_images[0].extent();
assert!(extent[2..].iter().all(|dim| *dim == 1));
[extent[1] as usize, extent[0] as usize]
}
/// Read out the current V species concentration
pub fn current_v(&mut self) -> Result<&Array2<Float>, Box<dyn Error>> {
// Download the current V species concentration
let current_image = self.v_images[self.src_is_1 as usize].clone();
let mut download_builder = AutoCommandBufferBuilder::primary(
&self.command_alloc,
self.queue.queue_family_index(),
CommandBufferUsage::OneTimeSubmit,
)?;
download_builder.copy_image_to_buffer(CopyImageToBufferInfo::image_buffer(
current_image,
self.v_buffer.clone(),
))?;
download_builder
.build()?
.execute(self.queue.clone())?
.then_signal_fence_and_flush()?
.wait(None)?;
// Access the CPU-side buffer
let v_data = self.v_buffer.read()?;
let v_target = self
.v_ndarray
.as_slice_mut()
.expect("Failed to access ndarray as slice");
v_target.copy_from_slice(&v_data);
Ok(&self.v_ndarray)
}
/// Run a simulation step
///
/// The user callback function `step` will be called with the proper
/// descriptor set for executing the GPU compute
pub fn update(
&mut self,
step: impl FnOnce(Arc<PersistentDescriptorSet>) -> Result<(), Box<dyn Error>>,
) -> Result<(), Box<dyn Error>> {
step(self.descriptor_sets[self.src_is_1 as usize].clone())?;
self.src_is_1 = !self.src_is_1;
Ok(())
}
}Some sacrifices were made to keep the API similar to the CPU version in this first GPU version:
- The
Concentrationsstruct needs to store a fair bit more state than its GPU version, including state that is only remotely related to its purpose like some elements of the Vulkan context. current_v()needs to build, submit, flush and await a command buffer for a single download command, which is not ideal in terms of CPU/GPU communication efficiency.current_v()needs to copy the freshly downloaded GPU data into a separateArray2in order to keep the API return type similar.- Although
update()was adapted to propagate GPU errors (which is necessary because almost every Vulkan function can error out), its API design was not otherwise modified to accomodate the asynchronous command buffer based workflow of Vulkan. As a result, we will need to “work around the API” through quite inelegant code later on.
Given these compromises, the minimal set of API changes needed are that…
new()has completely different parameters because it needs access to all the other GPU state, and we definitely don’t want to makeConcentrationsresponsible for managing that state too.- Both
current_v()andupdate()must be adapted to handle the fact that GPU APIs can error out a lot more often than CPU APIs.6 - The
update()callback needs a different signature because GPU code manipulates inputs and outputs very differently with respect to CPU code.
Exercise
Integrate all of the above into the Rust project’s gpu::resources module, then
make sure that the code still compiles. We are still not ready for a test
run, but certainly getting much closer.
If you are going fast and want a more challenging exercise…
- Get a bit closer to a production application by using the device-filtering hook from the GPU context creation function to make sure that the GPU that you automatically select actually does support the image format that you want to use.
- Explore the hardware support statistics provided by gpuinfo.org to learn more about what pixel formats are commonly supported and for what kind of API usage.
The GPU real world, not the tiny subset that CUDA and SYCL restrict you into in a vain attempt to make you believe that programming a GPU is just like programming a CPU and porting your apps will be easy.
Because it is considered a hardware implementation trade secret. But we can guess that it very likely involves some kind of space-filling curve like the Hilbert curve or the Morton curve.
Readers familiar with CUDA or SYCL may wonder why they have never heard of command buffers. As it turns out, those GPU compute APIs were modeled after old graphics APIs like OpenGL, where command batching was implicitly taken care of by the GPU driver through hidden global state. However decades of experience in using OpenGL have taught us that this approach scales poorly to multicore CPUs and is bad for any kind of application with real-time constraints, as it introduces unpredictable CPU thread slowdowns whenever the driver decides to turn a random command into a command batch submission. All modern graphics APIs have therefore switched to a Vulkan-like explicit command batch model, and even CUDA has semi-recently hacked away a similar abstraction called CUDA graphs.
Vulkan provides many synchronization primitives, including fences and semaphores. Fences can be used for CPU-GPU synchronization. Semaphores allow for this too but in addition they let you synchronize multiple GPU command queues with each other without round-tripping through the CPU. In exchange for this extra flexibility, semaphores can be expected to be slower at CPU-GPU synchronization.
This API design does require a fair amount of atomic reference counting
under the hood. But compared to the cost of other things we do when
interacting with the GPU, the atomic increments of a few Arc clones here
and there are not normally a significant cost. So I think that for a GPU
API binding, vulkano’s Arc-everywhere design is a reasonable choice.
We could adjust the CPU API to keep them in sync here by making its
corresponding entry points return Result<(), Box<dyn Error>> too. It
would just happen that the error case is never hit.
Execution
At this point, we have a Vulkan context, we have a compute pipeline, and we have descriptor sets that we can use to configure the pipeline’s inputs and outputs. Now all we need to do is put them together, and we will finally have a complete GPU simulation that we can test and optimize. Getting to this major milestone will be the goal of this chapter.
Work-groups
Back when we introduced this simulation’s GLSL shader, we mentioned in passing that work-groups are the Vulkan (more generally, Khronos) equivalent of NVidia CUDA’s thread blocks. As part of executing our compute pipeline, we will meet them again, so let’s discuss them a little more.
How work-groups came to be
Many decades ago, when GPU APIs started to expose programmable shaders to developers, they made one very important API design choice: to abstract away the many forms of hardware concurrency and parallelism (SIMD, VLIW/superscalar, hardware threading, multicore…) behind a single unifying “data-parallel for loop” interface.
In this grand unified design, the developer would write their program in terms of how a single visual component1 of the 3D scene is processed, then specify on the CPU side what is the set of visual components that the scene is made of, and the GPU driver and hardware would then be in charge of ensuring that all specified visual components are eventually processed by the developer-specified, possibly in parallel across multiple execution units.
To give the implementation maximal freedom, GPU APIs only exposed a minimal ability for these shader executions to communicate with each other. Basically, the only API-sanctioned way was to run multiple GPU jobs in a sequence, using outputs from job N to adjust the configuration of job N+1 from the CPU side. Anything else was a non-portable hack that required very good knowledge of the underlying hardware and how the GPU driver would map the GPU API to this hardware.
This model has served the graphics community very well, enabling GPU programs to achieve good compatibility across many different kinds of hardware, and to scale to very high degrees of hardware parallelism due to the small amount of communication that the API enforces. But as the numerical computing community started abusing GPUs for scientific computations, the lack of a fast communication primitive quickly emerged as a problem that warranted a better solution.
Work-groups today
Thus came work-groups, which introduced some hierarchy to the execution domain:
- The 1/2/3D range of indices over which the compute work is distributed is now sliced into contiguous blocks of uniform size, with blocks of size [1, 1, 1] roughly matching the API semantics of the former configuration.2
- Each work-item within a work-group is guaranteed to be executed concurrently on the same GPU compute unit, enabling fast communication through hardware channels like the compute unit’s L1 cache (aka shared/local memory) and group-local execution and memory barriers. In contrast, work-items from different work-groups may still only communicate with each other through very clever hacks of dubious portability, as before.
Since that time, further performance concerns have led to the exposure of even more hardware concepts in the GPU APIs3, further complexifying the execution model for those programs that want to use optimally efficient communication patterns. But work-groups remain to this day the only part of the GPU execution model that one needs to care about order to be able to use a GPU for computation at all. Even if your computation is purely data-parallel, like our first Gray-Scott reaction simulation, you will still need to set a work-group size in order to be able to run it.
Picking a work-group size
So what work-group size should you pick when you don’t care because your code is not communicating? Well, the answer depends on several factors:
- Work-groups should be at least as large as the GPU’s SIMD vector width, otherwise execution performance will drop by a corresponding factor. More generally, their size should be a multiple of the GPU’s SIMD vector width.
- Beyond that, if you do not need to communicate or otherwise leverage shared resources, smaller work groups are often better. They allow the GPU to distribute the work across more compute units, improve load balancing, and reduce pressure on shared compute unit resources like registers and the L1 cache.
- If you do use the shared resources, then you can try to increase the work-group size until either the trade-off becomes unfavorable and speed goes down or you reach the hardware limit. But that is generally a hardware-specific empirical tuning process.
Knowing that all GPU hardware in common use has a SIMD vector width that is a power of two smaller than 64, a work-group of 64 work-items sounds like a reasonable start. We may then fine-tune later on by increasing work-group size in increments of 64, to see how it affects performance.
Moving on, in 2D and 3D problems, there is also a question of work-group shape. Should work-groups be square/cubic? Rectangular? Horizontal or vertical lines? Here again, there is a trade-off:
- Hardware loves long streams of contiguous memory accesses. So whenever possible, work-group shape should follow the direction of contiguous data in memory and be as elongated as possible in this direction.
- But in stencil problems like ours, spatial locality also matters: it’s good if the data that is loaded by one work-item can be reused by another work-item within the same work-group, as the two work-items will then be able to leverage the fact that they share an L1 cache for improved memory access performance.
Here we are using images, whose memory layout is unspecified but optimized for 2D locality. And we obviously care about spatial locality for the purpose of loading our input data. Therefore, a square work-group sounds like a good starting point. And all in all, that is why we have initially set the GLSL work-group size to 8x8.
A single update step
For the purpose of making the CPU-to-GPU transition faster and easier, we will again mimick the design of the CPU API in the GPU API, even when it means doing some sub-optimal things in the first version. We will therefore again have a function that performs one GPU compute step, except this time said function will have this signature:
use crate::{
gpu::context::VulkanContext,
options::RunnerOptions,
};
use std::{error::Error, sync::Arc};
use vulkano::{
descriptor_set::PersistentDescriptorSet,
pipeline::ComputePipeline,
};
/// Run a simulation step on the GPU
pub fn update(
context: &VulkanContext,
options: &RunnerOptions,
pipeline: Arc<ComputePipeline>,
parameters: Arc<PersistentDescriptorSet>,
concentrations: Arc<PersistentDescriptorSet>,
) -> Result<(), Box<dyn Error>> {
// TODO: Actually do the work
}Notice that in addition to the three parameters that you most likely expected (the compute pipeline and the two resource descriptor sets that will be bound to it), we will also need a Vulkan context to submit commands, and the simulation runner options to tell how large the simulation domain is. And because this is GPU code, we also need to account for the possibility of API errors.
Inside of this function, we will first translate our simulation domain shape into a GPU dispatch size. This means that we will need to check that the simulation domain is composed of an integer amount of work-groups (a restriction of this version of the simulation which would be hard to work around4), and then translate the simulation domain shape into a number of work-groups that the GPU should run across each spatial dimension.
use crate::gpu::pipeline::WORK_GROUP_SHAPE;
assert!(
options.num_rows.max(options.num_cols) < u32::MAX as usize,
"Simulation domain has too many rows/columns for a GPU"
);
let num_rows = options.num_rows as u32;
let num_cols = options.num_cols as u32;
let work_group_cols = WORK_GROUP_SHAPE[0];
let work_group_rows = WORK_GROUP_SHAPE[1];
assert!(
(num_cols % work_group_cols).max(num_rows % work_group_rows) == 0,
"Simulation domain size must be a multiple of GPU work-group size"
);
let dispatch_size = [num_cols / work_group_cols, num_rows / work_group_rows, 1];Notice how as previously mentioned, we must be careful when mixing
simulation domain shapes (where dimensions are normally specified in [rows, columns] order) and GPU 2D spaces (where dimensions are normally specified in
[width, height] order).
After this, we’ll start to record a command buffer, and also grab a copy of our compute pipeline’s I/O layout for reasons that will become clear in the next step.
use vulkano::{
command_buffer::{AutoCommandBufferBuilder, CommandBufferUsage},
pipeline::Pipeline,
};
let mut builder = AutoCommandBufferBuilder::primary(
&context.command_alloc,
context.queue.queue_family_index(),
CommandBufferUsage::OneTimeSubmit,
)?;
let pipeline_layout = pipeline.layout().clone();We will then bind our compute pipeline (which moves it away, hence the previous layout copy) and its parameters (which requires a copy of the pipeline layout).
use crate::gpu::pipeline::PARAMS_SET;
use vulkano::pipeline::PipelineBindPoint;
builder
.bind_pipeline_compute(pipeline)?
.bind_descriptor_sets(
PipelineBindPoint::Compute,
pipeline_layout.clone(),
PARAMS_SET,
parameters,
)?;And then we will bind the current simulation inputs and outputs and schedule an execution of the compute pipeline with the previously computed number of work-groups…
use crate::gpu::pipeline::IMAGES_SET;
builder
.bind_descriptor_sets(
PipelineBindPoint::Compute,
pipeline_layout,
IMAGES_SET,
concentrations,
)?
.dispatch(dispatch_size)?;Finally, we will build the command buffer, submit it to the command queue, flush the command queue to the GPU, and wait for execution to finish.
use vulkano::{
command_buffer::PrimaryCommandBufferAbstract,
sync::GpuFuture,
};
builder
.build()?
.execute(context.queue.clone())?
.then_signal_fence_and_flush()?
.wait(None)?;With this, we get an update() function whose semantics roughly match those of
the CPU version, and will be thus easiest to integrate into the existing code.
But as you may have guessed while reading the previous code, some sacrifices had
to be made to achieve this:
- We are not leveraging Vulkan’s command batching capabilities. On every simulation step, we need to build a new command buffer that binds the simulation compute pipeline and parameters set, only to execute a single compute dispatch and wait for it. These overheads are especially bad because they are paid once per simulation step, so scaling up the number of compute steps per saved image will not amortize them.
- Compared to an optimized alternative that would just bind the compute
descriptor set and schedule a compute pipeline dispatch, leaving the rest up
to higher-level code, our
update()function needs to handle many unrelated concerns, and gets a more complex signature and complicated calling procedure as a result.
Therefore, as soon as we get the simulation to run, this should be our first target for optimization.
Exercise
At long last, we are ready to roll out a full Vulkan-based GPU simulation.
Integrate the simulation update function discussed above at the root of the
gpu module of the codebase, then write a new version of run_simulation() in
the same module that uses all the infrastructure introduced so far to run the
simulation on the GPU.
Next, make the simulation use the gpu version of run_simulation(). To enable
CPU/GPU comparisons, it is a good idea to to keep it easy to run the CPU
version. For example, you could have an off-by-default cpu: bool runner option
which lets you switch back to CPU mode.
Once the simulation builds, make sure that it runs successfully and without
significant5 Vulkan validation warnings. You can check the latter by running
the simulation binary in debug mode (cargo run --bin simulate without the
usual --release option). Beware that such a debug binary can be slow: you will
want to run it with a smaller number of simulation steps.
And finally, once the simulation binary seems to run successfully, you will adjust the microbenchmark to evaluate its performance:
- Add a new GPU update microbenchmark in addition to the existing CPU microbenchmark, so that you can measure how the two implementations compare.
- Add another GPU microbenchmark that measures the performance of getting the
data from the GPU to the CPU (via
Concentrations::current_v()).
Then run the resulting microbenchmark, and compare the performance characteristics of our first GPU version to the optimized CPU version.
I’m purposely being vague about what a “visual component” is, since even back in the day there were already two kinds of components with configurable processing (triangle vertex and pixel/fragment), and the list has grown enormously since: geometry primitives, tesselator inputs and outputs, rays, meshlets…
…albeit with bad performance because SIMD can’t help leaking through every nice abstraction and making the life of everyone more complicated.
First came sub-groups/warps, which expose hardware SIMD instructions. Then came NVidia’s thread-block clusters, which to my knowledge do not have a standardized Khronos name yet, but are basically about modeling L2 caches shards shared by multiple GPU compute units.
It could be done with a simple if in the current version, but would
become much harder when introducing later optimizations that leverage
the communication capabilities of work-groups and subgroups.
As a minor spoiler, you will find that even vulkano gets some subtleties
of Vulkan wrong.
Faster updates
At this point, we’re done with the basic simulation implementation work, and it
should hopefully now run for you. Now let’s tune it for better performance,
starting with the gpu::update() function.
Why update()?
The gpu::update() function is very performance-critical because it is the only
nontrivial function that runs once per compute step, and therefore the only
function whose performance impact cannot be amortized by increasing the number
of compute steps per saved image.
Yet this function is currently written in a fashion that uses Vulkan command buffers in a highly naive fashion, sending only one compute dispatch per invocation and waiting for it to complete before sending the next one. As a result, there are many steps of it that could be done once per saved image, but are currently done once per compute step:
- Creating a command buffer builder.
- Binding the compute pipeline.
- Binding the simulation parameters.
- Building the command buffer.
- Submitting it to the command queue for execution.
- Flushing the command queue.
- Waiting for the job to complete.
And then there is the work of computing the dispatch size, which is arguably not much but could still be done once in the entire simulation run, instead of once per step of the hottest program loop.
Exercise
Rework the simulation code to replace the current update() function with a
multi-update function, the basic idea of which is provided below:
use crate::gpu::context::CommandBufferAllocator;
use vulkano::{
command_buffer::PrimaryAutoCommandBuffer,
pipeline::PipelineLayout,
};
/// Command buffer builder type that we are going to use everywhere
type CommandBufferBuilder = AutoCommandBufferBuilder<
PrimaryAutoCommandBuffer<Arc<CommandBufferAllocator>>,
Arc<CommandBufferAllocator>,
>;
/// Add a single simulation update to the command buffer
fn add_update(
commands: &mut CommandBufferBuilder,
pipeline_layout: Arc<PipelineLayout>,
concentrations: Arc<PersistentDescriptorSet>,
dispatch_size: [u32; 3],
) -> Result<(), Box<dyn Error>> {
commands
.bind_descriptor_sets(
PipelineBindPoint::Compute,
pipeline_layout,
IMAGES_SET,
concentrations,
)?
.dispatch(dispatch_size)?;
Ok(())
}
/// Run multiple simulation steps and wait for them to complete
pub fn run_updates(
context: &VulkanContext,
dispatch_size: [u32; 3],
pipeline: Arc<ComputePipeline>,
parameters: Arc<PersistentDescriptorSet>,
concentrations: &mut Concentrations,
num_steps: usize,
) -> Result<(), Box<dyn Error>> {
// TODO: Write this code
}…then update the simulation and the microbenchmark, modifying the latter to
test for multiple number of compute steps. Don’t forget to adjust criterion’s
throughput computation!
You should find that this optimization is highly beneficial up to a certain batch size, where it starts becoming detrimental. This can be handled in two different ways:
- From
run_simulation(), callrun_updates()multiple times with a maximal number of steps when the number of steps becomes sufficiently large. This is easiest, but a little wasteful as we need to await the GPU every time when we could instead be building and submitting command buffers in a loop without waiting for the previous ones to complete until the very end. - Keep a single
run_updates()call, but inside of it, build and submit multiple command buffers, and await all of them at the end. Getting there will require you to learn more aboutvulkano’s futures-based synchronization mechanism, as you will want the execution of each command buffer to be scheduled after the previous one completes.
Overall, since the optimal command buffer size is likely to be hardware-dependent, you will want to make it configurable via command-line arguments, with a good (tuned) default value.
Avoiding copies
After cleaning up the CPU side of the simulation inner loop, let us now look into the outer loop, which generates images and saves them to disk.
Since writing to disk is mostly handled by HDF5, we will first look into the code which generates the output images, on which we have more leverage.
An unnecessary copy
Remember that to simplify the porting of the code from CPU to GPU, we initially
made the GPU version of Concentrations expose a current_v() interface with
the same happy-path return type as its CPU conterpart…
pub fn current_v(&mut self) -> Result<&Array2<Float>, Box<dyn Error>> {…which forced us to engage in some ugly data copying at the end of the function:
// Access the CPU-side buffer
let v_data = self.v_buffer.read()?;
let v_target = self
.v_ndarray
.as_slice_mut()
.expect("Failed to access ndarray as slice");
v_target.copy_from_slice(&v_data);
Ok(&self.v_ndarray)
}As a trip through a CPU profiler will tell you, we spend most of our CPU time copying data around in our current default configuration, where an output image is emitted every 34 simulation steps. So this copy might be performance-critical.
We could try to speed it up by parallelizing it. But it would be more satisfying
and more efficient to get rid of it entirely, along with the associated
v_ndarray member of the Concentrations struct. Let’s see what it would take.
What’s in a buffer read()?
To access the vulkano buffer into which the simulation results where
downloaded, we have used the Subbuffer::read()
method.
This method, in turn, is here to support vulkano’s goal of extending Rust’s
memory safety guarantees to GPU-accessible memory.
In Vulkan, both the GPU and the CPU can access the contents of a buffer. But
when we are working in Rust, they have to do so in a manner that upholds Rust’s
invariants. At any point in time, either only one code path can access the inner
data for writing, or any number of code paths can access it in a read-only
fashion. This is not a guarantee that is built in to the Vulkan API, so
vulkano has to implement it, and it opted to so at run time using a
reader-writer lock. Subbuffer::read() is how we acquire this lock for reading
on the CPU side.
Of course, if we acquire a lock, we must release it at some point. This is done
using an RAII type called
BufferReadGuard
which lets us access the reader data while we hold it, and will automatically
release the lock when we drop it. Unfortunately, this design means that we
cannot just wrap the lock’s inner data into an ArrayView2 and return it like
this:
use ndarray::ArrayView2;
// ...
pub fn current_v(&mut self) -> Result<ArrayView2<'_, Float>, Box<dyn Error>> {
// ... download the data ...
// Return a 2D array view of the freshly downloaded buffer
let v_data = self.v_buffer.read()?;
// ERROR: Returning a borrow of a stack variable
Ok(ArrayView2::from_shape(self.shape(), &v_data[..])?)
}…because if we were allowed to do it, we would be returning a reference to the
memory of v_buffer after the v_data read lock has been dropped, and then
another thread could trivially start a job that overwrites v_buffer and create
a data race. Which is not what Rust stands for.
If not ArrayView2, what else?
The easiest alternative that we have at our disposal1 is to return the Vulkan
buffer RAII lock object from Concentration::current_v()…
use vulkano::buffer::BufferReadGuard;
pub fn current_v(&mut self) -> Result<BufferReadGuard<'_, [Float]>, Box<dyn Error>> {
// ... download the data ...
// Expose the inner buffer's read lock
Ok(self.v_buffer.read()?)
}…and then, in run_simulation(), turn it into an ArrayView2 before sending
it to the HDF5 writer:
use ndarray::ArrayView2;
let shape = concentrations.shape();
let data = concentrations.current_v()?;
hdf5.write(ArrayView2::from_shape(shape, &data[..])?)?;We must then adapt said HDF5 writer so that it accepts an ArrayView2 instead
of an &Array2…
use ndarray::ArrayView2;
pub fn write(&mut self, result_v: ArrayView2<Float>) -> hdf5::Result<()> {…and then modify the CPU version of run_simulation() so that it turns the
&Array2 that it has into an ArrayView2, which is done with a simple call to
the view() method:
hdf5.write(concentrations.current_v().view())?;Exercise
Integrate these changes, and measure their effect on runtime performance.
You may notice that your microbenchmarks tell a different story than the running time of the main simulation binary. Can you guess why?
Alternatives with nicer-looking APIs involve creating self-referential objects, which in Rust are a rather advanced topic to put it mildly.
Storage tuning
As you may have guessed, the reason why our copy optimization had an effect on microbenchmarks, but not on the full simulation job, is that our simulation job does something that the microbenchmark doesn’t: writing results to disk. And this activity ends up becoming the performance bottleneck once the rest is taken care of, at least at our default settings of 34 simulation steps per saved image.
Therefore, even though this is not the main topic of this course, I will cover a few things you can try to improve the simulation’s storage I/O performance. This chapter comes with the following caveats:
- I/O timings are a lot more variable than compute timings, which means that a stable benchmarking setup can only obtained with a longer-running job. Microbenchmarking I/O requires a lot of care, and most of the time you should just time the full simulation job.
- The results of I/O optimizations will heavily depend on the storage medium that you are using. Most of the conclusions that I reach in the following chapters are explicitly marked as likely specific to my laptop’s NVMe storage, and it is expected that users of slower storage like hard drives or networked filesystems will reach very different conclusions.
- In real world simulation workloads, you should always keep in mind that doing less I/O is another option that should be on the team’s meeting agenda.
Compression
A closer look at the I/O code
Intuitively, storage I/O performance while the simulation is running can be affected either by the way storage I/O is configured, or by what we are doing on every storage write:
/// Create or truncate the file
///
/// The file will be dimensioned to store a certain amount of V species
/// concentration arrays.
///
/// The `Result` return type indicates that this method can fail and the
/// associated I/O errors must be handled somehow.
pub fn create(file_name: &str, shape: [usize; 2], num_images: usize) -> hdf5::Result<Self> {
// The ? syntax lets us propagate errors from an inner function call to
// the caller, when we cannot handle them ourselves.
let file = File::create(file_name)?;
let [rows, cols] = shape;
let dataset = file
.new_dataset::<Float>()
.chunk([1, rows, cols])
.shape([num_images, rows, cols])
.create("matrix")?;
Ok(Self {
file,
dataset,
position: 0,
})
}
/// Write a new V species concentration table to the file
pub fn write(&mut self, result_v: ArrayView2<Float>) -> hdf5::Result<()> {
self.dataset
.write_slice(result_v, (self.position, .., ..))?;
self.position += 1;
Ok(())
}Obviously, we cannot change much in write(), so let’s focus on chat happens
inside of create(). There are two obvious areas of leverage:
- We can change our hardcoded chunk size of 1 to something larger, and see if doing I/O at a higher granularity helps.
- Try to enable additional HDF5 options, such as compression, to reduce the volume of data that is eventually sent to the storage device.
In which order should we perform these optimizations? Well, compression is affected by block size, since it feeds the compression engine with more data, which can be either good (more patterns to compress) or bad (worse CPU cache locality slowing down the compression algorithm). Therefore, we should try to enable compression first.
Exercise
Previous experience from the course’s author suggests that on modern NVMe storage devices, only the LZ4/LZO/LZF family of fast compressors are still worthwhile. Anything more sophisticated, even Zstandard at compression level 1, will result in a net slowdown.
Therefore, please try to enable LZF dataset compression…
let dataset = file
.new_dataset::<Float>()
.chunk([1, rows, cols])
.lzf() // <- This is new
.shape([num_images, rows, cols])
.create("matrix")?;…and see if it helps or hurts for this particular computation, on your storage hardware.
You will need to enable the lzf optional feature of the hdf5 crate for
this to work. This has already been done for you in the container images to
accomodate the network access policies of HPC centers, but for reference, you
can do it like this:
cargo add --features=lzf hdf5
To see another side of the data compression tradeoff, also check the size of the output file before and after performing this change.
Block size
As we mentioned previously, the two most obvious optimizations that we can perform on the storage code are to add compression and adjust the storage block size. We have tried compression, now let’s try adjusting the block size.
To this end, please add a new runner option that controls the block size, wire
it up to HDF5Writer::create(), fix callers, and then try to tune the setting
up and see if it helps.
On modern local NVMe storage, you will find that this is an unfavorable tradeoff. But I wouldn’t be surprised if higher-latency storage, like the parallel filesystems used in HPC centers, would benefit from a larger block size. And in any case, it feels good to have one less hardcoded performance-sensitive number in the codebase.
Asynchronicity
Theory
We could spend more time playing with HDF5’s many settings. But my personal experiments suggest that overall, we’re not going to get much faster on NVMe storage with lossless compression.1
Instead, let us try to solve another issue of our storage I/O code. Namely the
fact that whenever the combination of HDF5 and the Linux kernel decides to
actually send some of our data to storage, our code ends up waiting for that I/O
to complete inside of HDF5Writer::write().
This is a shame because of instead of twiddling its thumbs like that, our code could instead be computing some extra simulation steps ahead. This way, whenever the I/O device is ready again, our code would be able to submit data to it faster, reducing the compute pause between two I/O transactions. In an ideal world, we should be able to get this to the point where whenever storage is able to accept new data from our code, our code is able to submit a new image immediately.
We must not overdo this optimization, however. The storage device is slower than the computation, so if we don’t cap the number of images that we generate in advance like this, we’ll just end up stacking up more and more images in RAM until we run out of memory. To avoid this, we will want to cap the number of pre-generated images that can be resident in RAM waiting to be picked up by I/O. This is called backpressure, and is an omnipresent concern in I/O-bound computations.
That’s it for the theory, now let’s see how this is done in practice.
Implementation
Here we will want to set up a dedicated I/O thread, which is in charge of
offloading HDF5Writer::write() calls away from the main thread in such a way
that only a bounded amount of pre-computed images may be waiting to be written
to storage. To this end, the I/O thread will be provided with two FIFO
channels:
- One channel goes from the main thread to the I/O thread, and is used to submit computed images to the I/O thread so that they get written to storage. This channel is bounded to a certain length to prevent endless accumulation of computed images.
- One channel goes from the I/O thread to the main thread, and is used to recycle previously allocated images after they have been written to disk. This channel does not need to be bounded because the other channel is enough to limit the number of images in flight.
Of course, we should not hardcode the FIFO length. So instead, we will make it configurable as yet another runner option:
/// Maximal number of images waiting to be written to storage
#[arg(long, default_value_t = 1)]
pub storage_buffer_len: usize,Inside of run_simulation(), we will then set up a threading scope. This is the
easiest API for spawning threads in Rust, because it lets us borrow data from
the outer scope, in exchange for joining all spawned threads at the end.
// Set up HDF5 I/O (unchanged, only repeated to show where the scope goes)
let mut hdf5 =
HDF5Writer::create(&opts.runner.file_name, concentrations.shape(), &opts.runner)?;
// Set up a scope for the I/O thread
std::thread::scope(|s| {
// TODO: Set up I/O thread, then performed overlapped compute and I/O
// Need to hint the compiler about the output error type
Ok::<_, Box<dyn Error>>(())
})?;
// Remove final hdf5.close(), this will now be handled by the I/O thread
Ok(())Then we set up FIFO communication channels with the I/O threads, making sure that the channel for sending images from the main thread to the I/O thread has a bounded capacity.
use std::sync::mpsc;
let (result_send, result_recv) =
mpsc::sync_channel::<Array2<Float>>(opts.runner.storage_buffer_len);
let (recycle_send, recycle_recv) = mpsc::channel();After this, we start the I/O thread. This thread acquires ownership of the
HDF5Writer, the FIFO endpoint that received computed images, and the FIFO
endpoint that sends back images after writing them to storage. It then proceeds
to iterate over computed images from the main thread until the main thread drops
result_send, sending back images after writing them to storage, and at the end
it closes the HDF5 writer.
s.spawn(move || {
for image in result_recv {
hdf5.write(image.view()).expect("Failed to write image");
// Ignore failures to recycle images: it only means that the main thread
// has stopped running, which is normal at the end of the simulation.
let _ = recycle_send.send(image);
}
hdf5.close().expect("Failed to close HDF5 file");
});Notice that we allow ourselves to handle errors via panicking here. This is fine
because if the I/O thread does panic, it will automatically close the
result_recv FIFO channel, which will close the matching result_send endpoint
on the main thread side. Thus the main thread will detect that the I/O thread is
not able to accept images anymore and will be able to handle it as an error.
After this comes a tricky part: for everything to work out smoothly, we must start a new scope and move the main thread’s FIFO endpoints into it:
{
// Move the I/O channels here to ensure they get dropped
let (result_send, recycle_recv) = (result_send, recycle_recv);
// ... compute and send images
}The reason why we do this is that this ensures that once the main thread is
done, its FIFO channels get dropped. This will be detected by the I/O thread,
and will result in iteration over result_recv stopping. As a result, the I/O
thread will move on, close the HDF5 writer, and terminate.
Finally, on the main thread side, we set up sending of owned images to the I/O thread, with proper allocation recycling…
use crate::data::Float;
use ndarray::Array2;
use std::sync::mpsc::TryRecvError;
let shape = concentrations.shape();
let data = concentrations.current_v()?;
let computed_image = ArrayView2::from_shape(shape, &data[..])?;
let mut owned_image = match recycle_recv.try_recv() {
Ok(owned_image) => owned_image,
Err(TryRecvError::Empty) => Array2::default(shape),
Err(TryRecvError::Disconnected) => panic!("I/O thread stopped unexpectedly"),
};
owned_image.assign(&computed_image);
result_send.send(owned_image)?;Exercise
Implement this optimization in your code and measure its performance impact on your hardware.
If your storage is fast, you may find that the sequential copy of the image data
from computed_image to owned_image becomes a bottleneck. In that case, you
will want to look into parallelizing this operation with Rayon so that it puts
your RAM bandwidth to better use.
Lossy compression can get us a lot further, but it tends to trigger the anger of our scientist colleagues and only be accepted after long hours of political negotiation, so we should only consider it as a last resort.
The last 90%
At this point, with the default configuration of 34 simulation steps per output image, our computation is fully I/O bound and has all of the obvious I/O optimizations applied. Therefore, for this default configuration, the next step would be to spend more time studying the HDF5 configuration in order to figure out if there is any other I/O tuning knob that we can leverage to speed up the I/O part further. Which goes beyond the scope of this GPU-centric chapter.
However, if you reduce the number of saved images by using CLI options like
-e340 -n100, -e3400 -n10, or even -e34000 -n1, you will find that the
simulation starts speeding up, then saturates at some maximal speed. This is the
point where the computation stops being I/O-bound and becomes compute-bound
again.
What options would we have to speed the GPU code up in this configuration? Here are some possible tracks that you may want to explore:
- We have a JiT compiler around, it’s a shame that right now we are only treating it as a startup latency liability and not leveraging its benefits. Use specialization constants to ensure that the GPU code is specialized for the simulation parameters that you are using.
- We are doing so little with samplers that it is dubious whether using them is worthwhile, and we should test this. Stop using samplers for input images, and instead try both if-testing in the shader and a strip of zeros on the edge of the GPU image.
- While we are at it, are we actually sure that 2D images are faster than manual 2D indexing of a 1D buffer, as they intuitively should be? It would be a good idea to do another version that uses buffers, and manually caches data using local memory. This will likely change the optimal work-group size, so we will want to make this parameter easily tunable via specialization constants, then tune it.
- Modern GPUs also have explicit SIMD instructions, which in Vulkan are accessible via the optional subgroup extension. It should be possible to use them to exchange neighboring data between threads faster than local memory can allow. But in doing so, we will need to handle the fact that subgroups are not portable across all hardware (the Vulkan extension may or may not be present), which will likely require some code duplication.
- The advanced SIMD chapter’s data layout was designed for maximal efficiency on SIMD hardware, and modern GPUs are basically a thin shell around a bunch of SIMD ALUs. Would this layout also help GPU performance? There is only one way to find out.
- Our microbenchmarks tell us that our GPU is not quite operating at peak throughput when processing a single 1920x1080 image. It would be nice to try processing multiple images in a single compute dispatch, but this will require implementing a global synchronization protocol during the execution of a single kernel, which will require very fancy/tricky lock-free programming in global memory.
- So far, we have not attempted to overlap GPU computing with CPU-GPU data transfers, as those data transfers were relatively inexpensive with respect to both compute and storage I/O costs. But if we optimize compute enough, this may change. We would then want to allocate a dedicated data transfer queue, and carefully tune our resource allocations so that those that need to be accessible from both queues are actually marked as such. And then we will need to set up a third image as a GPU-side staging buffer (so the double buffer can still be used for compute when a data transfer is ongoing) and refine our CPU/GPU synchronization logic to get the compute/transfer overlap to work.
Also, there are the other GPU APIs that are available from Rust. How much
performance do we lose when we improve portability by using wgpu instead of
Vulkan? How far along is rust-gpu these days, and is krnl any close to the
portable CUDA clone that it aims to be? These are all interesting questions,
that we should probably explore once we have a good Vulkan version as a
reference point that tells us what a mature GPU API is capable of.
As you can probably guess at this point, GPU computing is not immune to old software project management wisdom: once you are done with the first 90% of a project, you are ready to take on the remaining 90%.
Next steps
This concludes our introduction to numerical computations in Rust. I hope you enjoyed it.
As you could see, the language is in a bit of an interesting spot as of 2024, where this course is written. Some aspects like iterators and multi-threading are much more advanced than in any other programming language, others like SIMD and N-d arrays are in a place that’s roughly comparable to the C++ state of the art, and then other things like GPU programming need more work, that in some cases is itself blocked on more fundamental ongoing language/compiler work (variadic generics, generic const expressions, specialization, etc).
What the language needs most today, however, are contributors to the library ecosystem. So if you think that Rust is close to your needs, and would be usable for project X if and only if it had library Y, then stop and think. Do you have the time to contribute to the existing library Y draft, or to write one from scratch yourself? And would this be more or less worthy of your time, in the long run, than wasting hours on programming languages that have a more mature library ecosystem, but whose basic design is stuck in an evolutionary dead-end?
If you think the latter, then consider first perfecting your understanding of Rust with one of these fine reference books:
- The Rust Programming Language is maintained by core contributors of the project, often most up to date with respect to language evolutions, and freely available online. It is, however, written for an audience that is relatively new to programming, so its pace can feel a bit slow for experienced practicioners of other programming languages.
- For this more advanced audience, the “Programming Rust” book by Blandy et al is a worthy purchase. It assumes the audience already has some familiarity with C/++, and exploits this to skip more quickly to aspects of the language that this audience will find interesting.
More of a fan of learning by doing? There are resources for that as well, like the Rustlings interactive tutorial that teaches you the language by making your fix programs that don’t compile, or Rust By Example which gives you lots of ready-made snippets that you can take inspiration from in your early Rust projects.
And then, as you get more familiar with the language, you will be hungry for more reference documentation. Common docs to keep close by are the standard library docs, Cargo book, language reference, and the Rustonomicon for those cases that warrant the use of unsafe code.
You can find all of these links and more on the language’s official documentation page at https://www.rust-lang.org/learn.
And that will be it for this course. So long, and thanks for all the fish!